 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFocused Blind Switching Manipulation Based on Constrained and Regional Touch States of Multi-Fingered Hand Using Deep Learning
Mar 10, 2025To achieve a desired grasping posture (including object position and orientation), multi-finger motions need to be conducted according to the the current touch state. Specifically, when subtle changes happen during correcting the object state, not only proprioception but also tactile information from the entire hand can be beneficial. However, switching motions with high-DOFs of multiple fingers and abundant tactile information is still challenging. In this study, we propose a loss function with constraints of touch states and an attention mechanism for focusing on important modalities depending on the touch states. The policy model is AE-LSTM which consists of Autoencoder (AE) which compresses abundant tactile information and Long Short-Term Memory (LSTM) which switches the motion depending on the touch states. Motion for cap-opening was chosen as a target task which consists of subtasks of sliding an object and opening its cap. As a result, the proposed method achieved the best success rates with a variety of objects for real time cap-opening manipulation. Furthermore, we could confirm that the proposed model acquired the features of each subtask and attention on specific modalities.
Multi-Fingered In-Hand Manipulation with Various Object Properties Using Graph Convolutional Networks and Distributed Tactile Sensors
May 09, 2022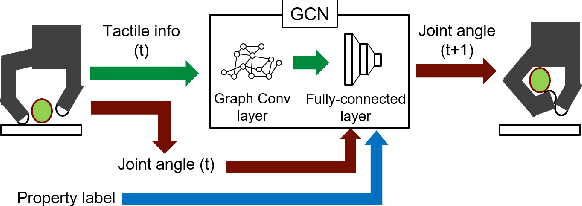
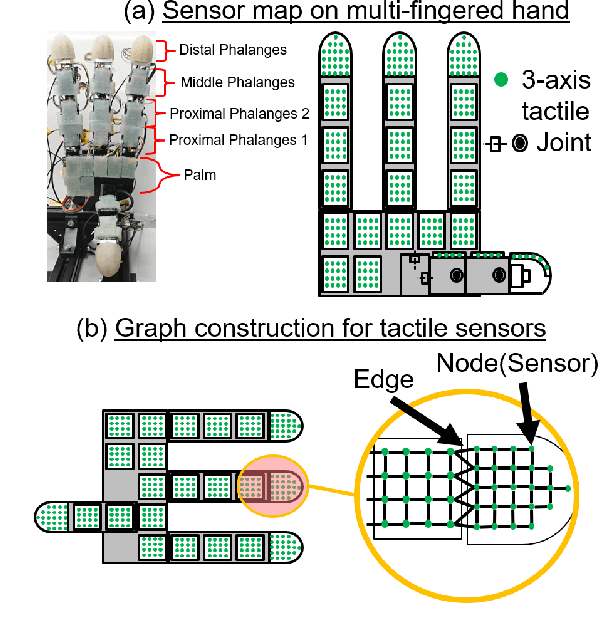

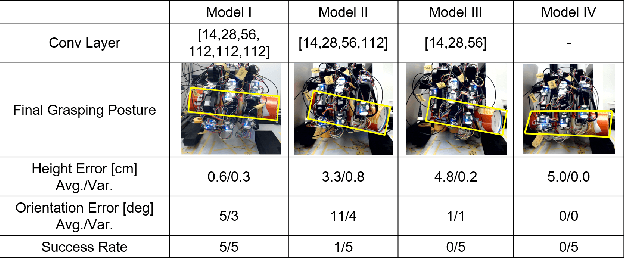
Multi-fingered hands could be used to achieve many dexterous manipulation tasks, similarly to humans, and tactile sensing could enhance the manipulation stability for a variety of objects. However, tactile sensors on multi-fingered hands have a variety of sizes and shapes. Convolutional neural networks (CNN) can be useful for processing tactile information, but the information from multi-fingered hands needs an arbitrary pre-processing, as CNNs require a rectangularly shaped input, which may lead to unstable results. Therefore, how to process such complex shaped tactile information and utilize it for achieving manipulation skills is still an open issue. This paper presents a control method based on a graph convolutional network (GCN) which extracts geodesical features from the tactile data with complicated sensor alignments. Moreover, object property labels are provided to the GCN to adjust in-hand manipulation motions. Distributed tri-axial tactile sensors are mounted on the fingertips, finger phalanges and palm of an Allegro hand, resulting in 1152 tactile measurements. Training data is collected with a data-glove to transfer human dexterous manipulation directly to the robot hand. The GCN achieved high success rates for in-hand manipulation. We also confirmed that fragile objects were deformed less when correct object labels were provided to the GCN. When visualizing the activation of the GCN with a PCA, we verified that the network acquired geodesical features. Our method achieved stable manipulation even when an experimenter pulled a grasped object and for untrained objects.