 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultispectral Remote Sensing for Weed Detection in West Australian Agricultural Lands
Feb 12, 2025The Kondinin region in Western Australia faces significant agricultural challenges due to pervasive weed infestations, causing economic losses and ecological impacts. This study constructs a tailored multispectral remote sensing dataset and an end-to-end framework for weed detection to advance precision agriculture practices. Unmanned aerial vehicles were used to collect raw multispectral data from two experimental areas (E2 and E8) over four years, covering 0.6046 km^{2} and ground truth annotations were created with GPS-enabled vehicles to manually label weeds and crops. The dataset is specifically designed for agricultural applications in Western Australia. We propose an end-to-end framework for weed detection that includes extensive preprocessing steps, such as denoising, radiometric calibration, image alignment, orthorectification, and stitching. The proposed method combines vegetation indices (NDVI, GNDVI, EVI, SAVI, MSAVI) with multispectral channels to form classification features, and employs several deep learning models to identify weeds based on the input features. Among these models, ResNet achieves the highest performance, with a weed detection accuracy of 0.9213, an F1-Score of 0.8735, an mIOU of 0.7888, and an mDC of 0.8865, validating the efficacy of the dataset and the proposed weed detection method.
* 8 pages, 9 figures, 1 table, Accepted for oral presentation at IEEE 25th International Conference on Digital Image Computing: Techniques and Applications (DICTA 2024). Conference Proceeding: 979-8-3503-7903-7/24/\$31.00 (C) 2024 IEEE
Automated Road Extraction and Centreline Fitting in LiDAR Point Clouds
Feb 11, 2025Road information extraction from 3D point clouds is useful for urban planning and traffic management. Existing methods often rely on local features and the refraction angle of lasers from kerbs, which makes them sensitive to variable kerb designs and issues in high-density areas due to data homogeneity. We propose an approach for extracting road points and fitting centrelines using a top-down view of LiDAR based ground-collected point clouds. This prospective view reduces reliance on specific kerb design and results in better road extraction. We first perform statistical outlier removal and density-based clustering to reduce noise from 3D point cloud data. Next, we perform ground point filtering using a grid-based segmentation method that adapts to diverse road scenarios and terrain characteristics. The filtered points are then projected onto a 2D plane, and the road is extracted by a skeletonisation algorithm. The skeleton is back-projected onto the 3D point cloud with calculated normals, which guide a region growing algorithm to find nearby road points. The extracted road points are then smoothed with the Savitzky-Golay filter to produce the final centreline. Our initial approach without post-processing of road skeleton achieved 67% in IoU by testing on the Perth CBD dataset with different road types. Incorporating the post-processing of the road skeleton improved the extraction of road points around the smoothed skeleton. The refined approach achieved a higher IoU value of 73% and with 23% reduction in the processing time. Our approach offers a generalised and computationally efficient solution that combines 3D and 2D processing techniques, laying the groundwork for future road reconstruction and 3D-to-2D point cloud alignment.
Fast-PGM: Fast Probabilistic Graphical Model Learning and Inference
May 28, 2024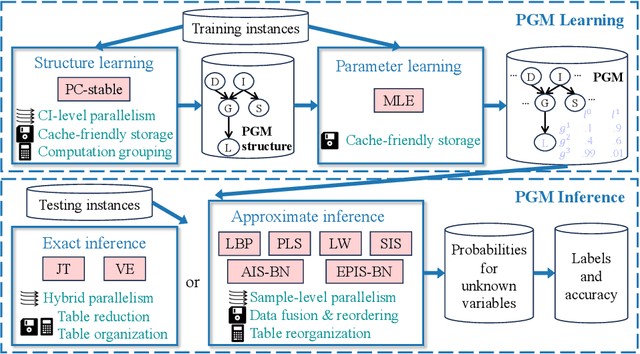
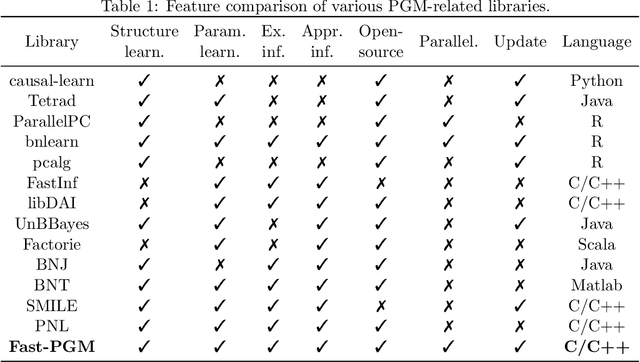
Probabilistic graphical models (PGMs) serve as a powerful framework for modeling complex systems with uncertainty and extracting valuable insights from data. However, users face challenges when applying PGMs to their problems in terms of efficiency and usability. This paper presents Fast-PGM, an efficient and open-source library for PGM learning and inference. Fast-PGM supports comprehensive tasks on PGMs, including structure and parameter learning, as well as exact and approximate inference, and enhances efficiency of the tasks through computational and memory optimizations and parallelization techniques. Concurrently, Fast-PGM furnishes developers with flexible building blocks, furnishes learners with detailed documentation, and affords non-experts user-friendly interfaces, thereby ameliorating the usability of PGMs to users across a spectrum of expertise levels. The source code of Fast-PGM is available at https://github.com/jjiantong/FastPGM.
Fast Parallel Exact Inference on Bayesian Networks: Poster
Dec 08, 2022Bayesian networks (BNs) are attractive, because they are graphical and interpretable machine learning models. However, exact inference on BNs is time-consuming, especially for complex problems. To improve the efficiency, we propose a fast BN exact inference solution named Fast-BNI on multi-core CPUs. Fast-BNI enhances the efficiency of exact inference through hybrid parallelism that tightly integrates coarse- and fine-grained parallelism. We also propose techniques to further simplify the bottleneck operations of BN exact inference. Fast-BNI source code is freely available at https://github.com/jjiantong/FastBN.