 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFederated Learning for Cross-Modality Medical Image Segmentation via Augmentation-Driven Generalization
Feb 24, 2026Artificial intelligence has emerged as a transformative tool in medical image analysis, yet developing robust and generalizable segmentation models remains difficult due to fragmented, privacy-constrained imaging data siloed across institutions. While federated learning (FL) enables collaborative model training without centralizing data, cross-modality domain shifts pose a critical challenge, particularly when models trained on one modality fail to generalize to another. Many existing solutions require paired multimodal data per patient or rely on complex architectures, both of which are impractical in real clinical settings. In this work, we consider a realistic FL scenario where each client holds single-modality data (CT or MRI), and systematically investigate augmentation strategies for cross-modality generalization. Using abdominal organ segmentation and whole-heart segmentation as representative multi-class and binary segmentation benchmarks, we evaluate convolution-based spatial augmentation, frequency-domain manipulation, domain-specific normalization, and global intensity nonlinear (GIN) augmentation. Our results show that GIN consistently outperforms alternatives in both centralized and federated settings by simulating cross-modality appearance variations while preserving anatomical structure. For the pancreas, Dice score improved from 0.073 to 0.437, a 498% gain. Our federated approach achieves 93-98% of centralized training accuracy, demonstrating strong cross-modality generalization without compromising data privacy, pointing toward feasible federated AI deployment across diverse healthcare systems.
FedGIN: Federated Learning with Dynamic Global Intensity Non-linear Augmentation for Organ Segmentation using Multi-modal Images
Aug 07, 2025Medical image segmentation plays a crucial role in AI-assisted diagnostics, surgical planning, and treatment monitoring. Accurate and robust segmentation models are essential for enabling reliable, data-driven clinical decision making across diverse imaging modalities. Given the inherent variability in image characteristics across modalities, developing a unified model capable of generalizing effectively to multiple modalities would be highly beneficial. This model could streamline clinical workflows and reduce the need for modality-specific training. However, real-world deployment faces major challenges, including data scarcity, domain shift between modalities (e.g., CT vs. MRI), and privacy restrictions that prevent data sharing. To address these issues, we propose FedGIN, a Federated Learning (FL) framework that enables multimodal organ segmentation without sharing raw patient data. Our method integrates a lightweight Global Intensity Non-linear (GIN) augmentation module that harmonizes modality-specific intensity distributions during local training. We evaluated FedGIN using two types of datasets: an imputed dataset and a complete dataset. In the limited dataset scenario, the model was initially trained using only MRI data, and CT data was added to assess its performance improvements. In the complete dataset scenario, both MRI and CT data were fully utilized for training on all clients. In the limited-data scenario, FedGIN achieved a 12 to 18% improvement in 3D Dice scores on MRI test cases compared to FL without GIN and consistently outperformed local baselines. In the complete dataset scenario, FedGIN demonstrated near-centralized performance, with a 30% Dice score improvement over the MRI-only baseline and a 10% improvement over the CT-only baseline, highlighting its strong cross-modality generalization under privacy constraints.
Optimizing Federated Learning Configurations for MRI Prostate Segmentation and Cancer Detection: A Simulation Study
Jul 30, 2025Purpose: To develop and optimize a federated learning (FL) framework across multiple clients for biparametric MRI prostate segmentation and clinically significant prostate cancer (csPCa) detection. Materials and Methods: A retrospective study was conducted using Flower FL to train a nnU-Net-based architecture for MRI prostate segmentation and csPCa detection, using data collected from January 2010 to August 2021. Model development included training and optimizing local epochs, federated rounds, and aggregation strategies for FL-based prostate segmentation on T2-weighted MRIs (four clients, 1294 patients) and csPCa detection using biparametric MRIs (three clients, 1440 patients). Performance was evaluated on independent test sets using the Dice score for segmentation and the Prostate Imaging: Cancer Artificial Intelligence (PI-CAI) score, defined as the average of the area under the receiver operating characteristic curve and average precision, for csPCa detection. P-values for performance differences were calculated using permutation testing. Results: The FL configurations were independently optimized for both tasks, showing improved performance at 1 epoch 300 rounds using FedMedian for prostate segmentation and 5 epochs 200 rounds using FedAdagrad, for csPCa detection. Compared with the average performance of the clients, the optimized FL model significantly improved performance in prostate segmentation and csPCa detection on the independent test set. The optimized FL model showed higher lesion detection performance compared to the FL-baseline model, but no evidence of a difference was observed for prostate segmentation. Conclusions: FL enhanced the performance and generalizability of MRI prostate segmentation and csPCa detection compared with local models, and optimizing its configuration further improved lesion detection performance.
Federated Smoothing ADMM for Localization
Mar 12, 2025This paper addresses the challenge of localization in federated settings, which are characterized by distributed data, non-convexity, and non-smoothness. To tackle the scalability and outlier issues inherent in such environments, we propose a robust algorithm that employs an $\ell_1$-norm formulation within a novel federated ADMM framework. This approach addresses the problem by integrating an iterative smooth approximation for the total variation consensus term and employing a Moreau envelope approximation for the convex function that appears in a subtracted form. This transformation ensures that the problem is smooth and weakly convex in each iteration, which results in enhanced computational efficiency and improved estimation accuracy. The proposed algorithm supports asynchronous updates and multiple client updates per iteration, which ensures its adaptability to real-world federated systems. To validate the reliability of the proposed algorithm, we show that the method converges to a stationary point, and numerical simulations highlight its superior performance in convergence speed and outlier resilience compared to existing state-of-the-art localization methods.
Distributed Filtering Design with Enhanced Resilience to Coordinated Byzantine Attacks
Jul 26, 2023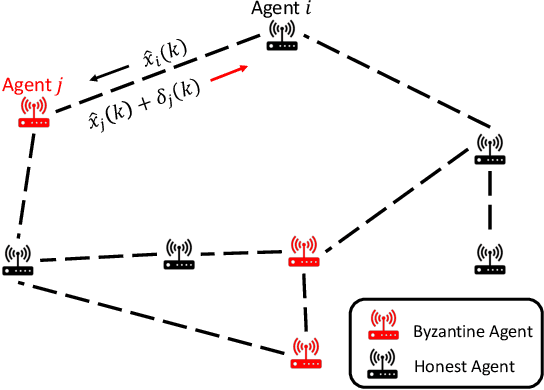
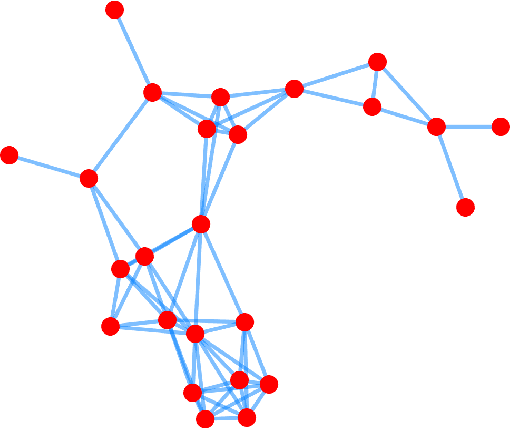
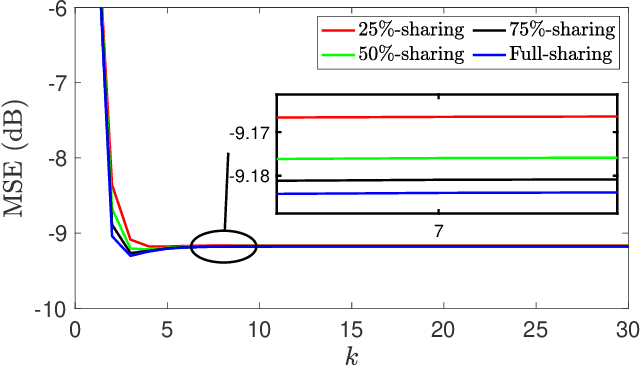
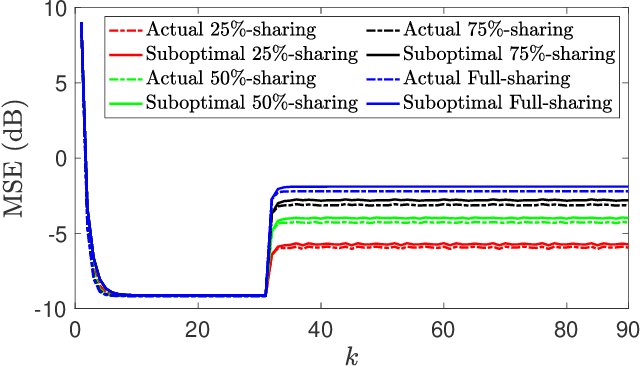
This paper proposes a Byzantine-resilient consensus-based distributed filter (BR-CDF) wherein network agents employ partial sharing of state parameters. We characterize the performance and convergence of the BR-CDF and study the impact of a coordinated data falsification attack. Our analysis shows that sharing merely a fraction of the states improves robustness against coordinated Byzantine attacks. In addition, we model the optimal attack strategy as an optimization problem where Byzantine agents design their attack covariance or the sequence of shared fractions to maximize the network-wide mean squared error (MSE). Numerical results demonstrate the accuracy of the proposed BR-CDF and its robustness against Byzantine attacks. Furthermore, the simulation results show that the influence of the covariance design is more pronounced when agents exchange larger portions of their states with neighbors. In contrast, the performance is more sensitive to the sequence of shared fractions when smaller portions are exchanged.