 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplicit Spatial Encoding for Deep Local Descriptors
Apr 15, 2019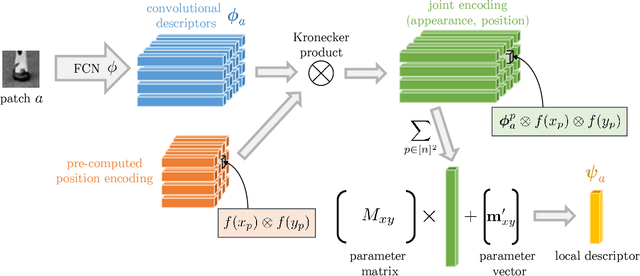


We propose a kernelized deep local-patch descriptor based on efficient match kernels of neural network activations. Response of each receptive field is encoded together with its spatial location using explicit feature maps. Two location parametrizations, Cartesian and polar, are used to provide robustness to a different types of canonical patch misalignment. Additionally, we analyze how the conventional architecture, i.e. a fully connected layer attached after the convolutional part, encodes responses in a spatially variant way. In contrary, explicit spatial encoding is used in our descriptor, whose potential applications are not limited to local-patches. We evaluate the descriptor on standard benchmarks. Both versions, encoding 32x32 or 64x64 patches, consistently outperform all other methods on all benchmarks. The number of parameters of the model is independent of the input patch resolution.
Understanding and Improving Kernel Local Descriptors
Nov 27, 2018

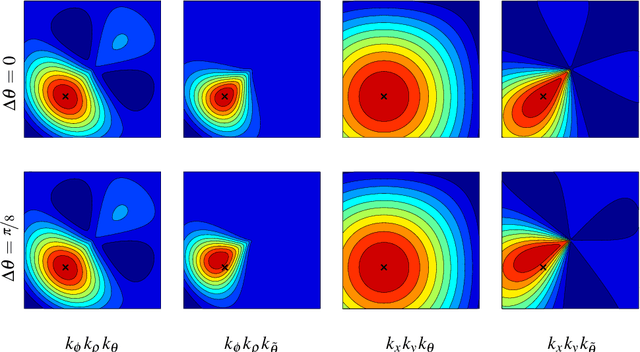
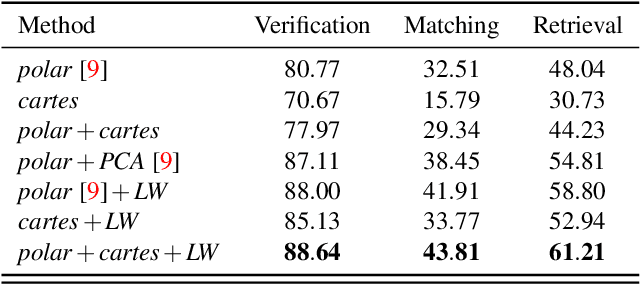
We propose a multiple-kernel local-patch descriptor based on efficient match kernels from pixel gradients. It combines two parametrizations of gradient position and direction, each parametrization provides robustness to a different type of patch mis-registration: polar parametrization for noise in the patch dominant orientation detection, Cartesian for imprecise location of the feature point. Combined with whitening of the descriptor space, that is learned with or without supervision, the performance is significantly improved. We analyze the effect of the whitening on patch similarity and demonstrate its semantic meaning. Our unsupervised variant is the best performing descriptor constructed without the need of labeled data. Despite the simplicity of the proposed descriptor, it competes well with deep learning approaches on a number of different tasks.
Multiple-Kernel Local-Patch Descriptor
Jul 25, 2017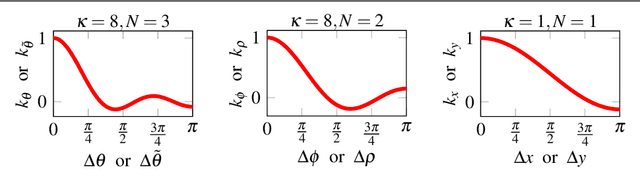
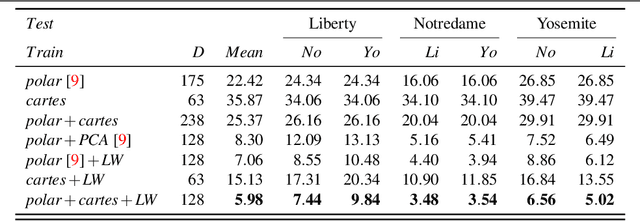
We propose a multiple-kernel local-patch descriptor based on efficient match kernels of patch gradients. It combines two parametrizations of gradient position and direction, each parametrization provides robustness to a different type of patch miss-registration: polar parametrization for noise in the patch dominant orientation detection, Cartesian for imprecise location of the feature point. Even though handcrafted, the proposed method consistently outperforms the state-of-the-art methods on two local patch benchmarks.