 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeT-3DGS: Removing Transient Objects for 3D Scene Reconstruction
Nov 29, 2024



We propose a novel framework to remove transient objects from input videos for 3D scene reconstruction using Gaussian Splatting. Our framework consists of the following steps. In the first step, we propose an unsupervised training strategy for a classification network to distinguish between transient objects and static scene parts based on their different training behavior inside the 3D Gaussian Splatting reconstruction. In the second step, we improve the boundary quality and stability of the detected transients by combining our results from the first step with an off-the-shelf segmentation method. We also propose a simple and effective strategy to track objects in the input video forward and backward in time. Our results show an improvement over the current state of the art in existing sparsely captured datasets and significant improvements in a newly proposed densely captured (video) dataset. More results and code are available at https://transient-3dgs.github.io.
A-CNN: Annularly Convolutional Neural Networks on Point Clouds
Apr 16, 2019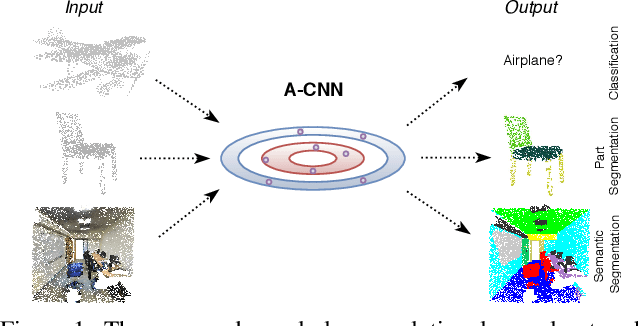

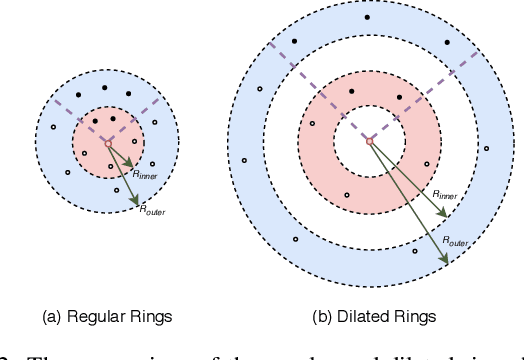
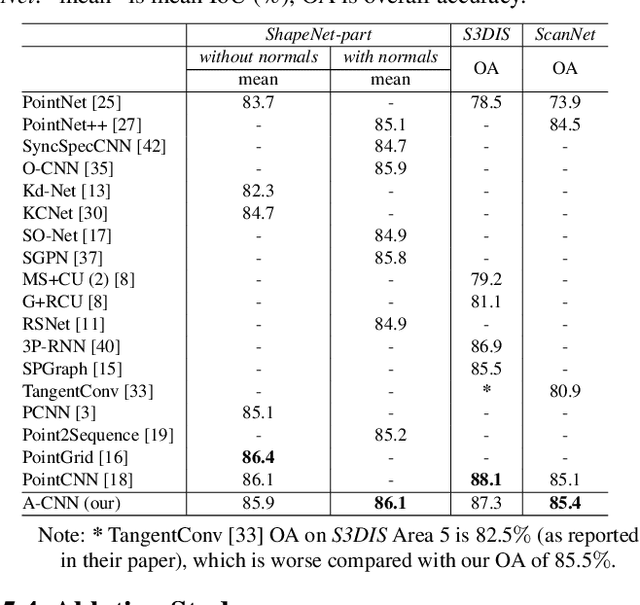
Analyzing the geometric and semantic properties of 3D point clouds through the deep networks is still challenging due to the irregularity and sparsity of samplings of their geometric structures. This paper presents a new method to define and compute convolution directly on 3D point clouds by the proposed annular convolution. This new convolution operator can better capture the local neighborhood geometry of each point by specifying the (regular and dilated) ring-shaped structures and directions in the computation. It can adapt to the geometric variability and scalability at the signal processing level. We apply it to the developed hierarchical neural networks for object classification, part segmentation, and semantic segmentation in large-scale scenes. The extensive experiments and comparisons demonstrate that our approach outperforms the state-of-the-art methods on a variety of standard benchmark datasets (e.g., ModelNet10, ModelNet40, ShapeNet-part, S3DIS, and ScanNet).