 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA-CNN: Annularly Convolutional Neural Networks on Point Clouds
Paper and Code
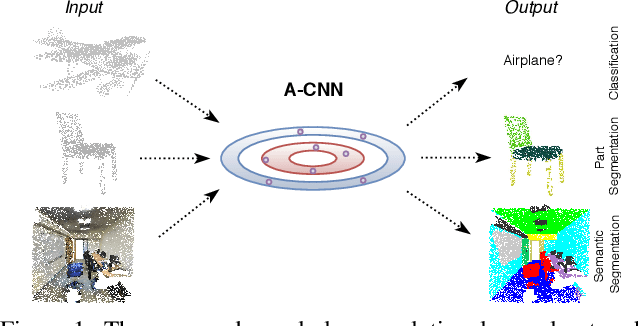

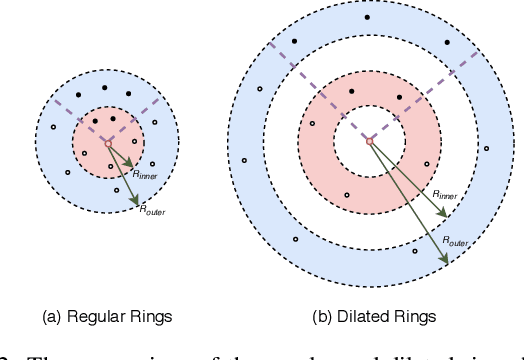
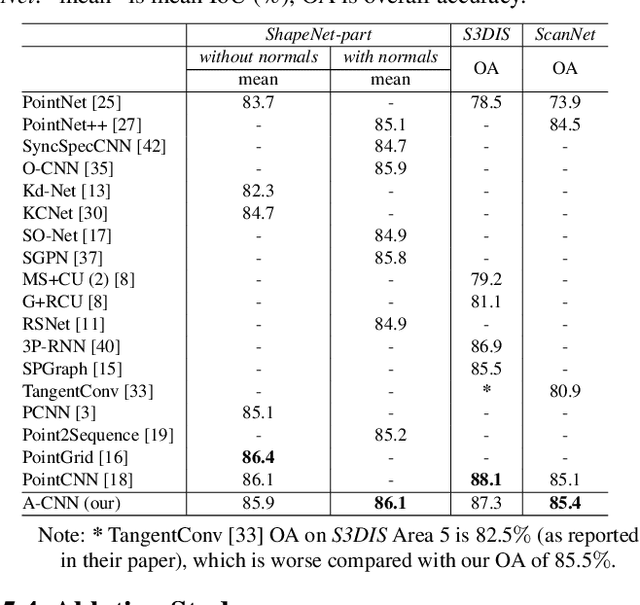
Analyzing the geometric and semantic properties of 3D point clouds through the deep networks is still challenging due to the irregularity and sparsity of samplings of their geometric structures. This paper presents a new method to define and compute convolution directly on 3D point clouds by the proposed annular convolution. This new convolution operator can better capture the local neighborhood geometry of each point by specifying the (regular and dilated) ring-shaped structures and directions in the computation. It can adapt to the geometric variability and scalability at the signal processing level. We apply it to the developed hierarchical neural networks for object classification, part segmentation, and semantic segmentation in large-scale scenes. The extensive experiments and comparisons demonstrate that our approach outperforms the state-of-the-art methods on a variety of standard benchmark datasets (e.g., ModelNet10, ModelNet40, ShapeNet-part, S3DIS, and ScanNet).