 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurrogate-assisted Bayesian inversion for landscape and basin evolution models
Dec 12, 2018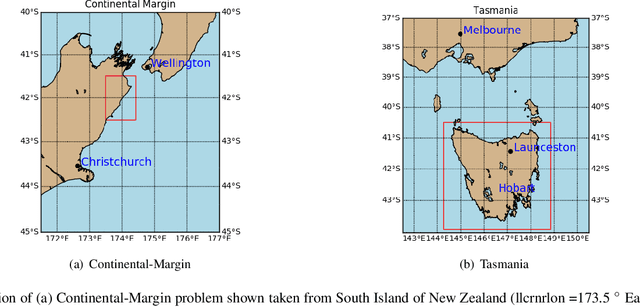
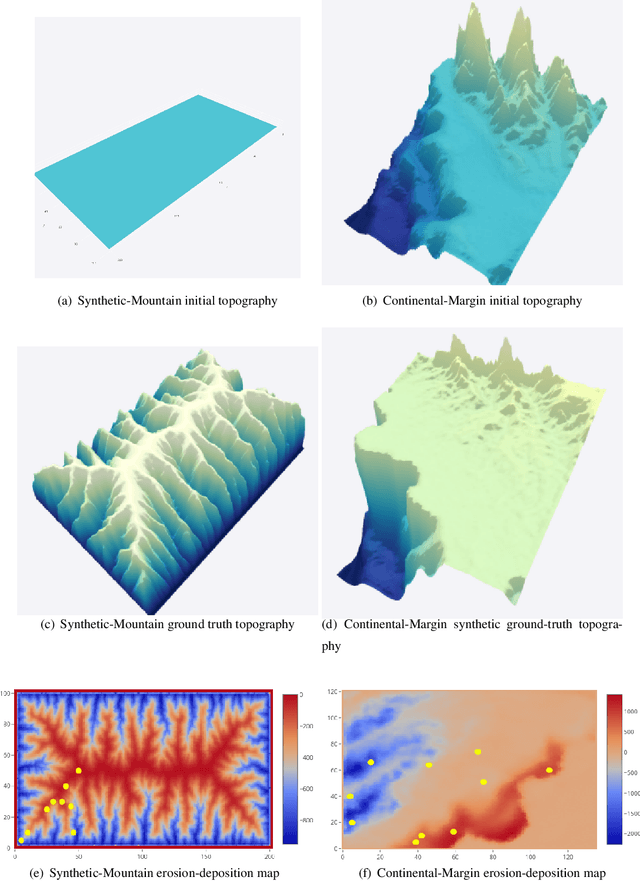

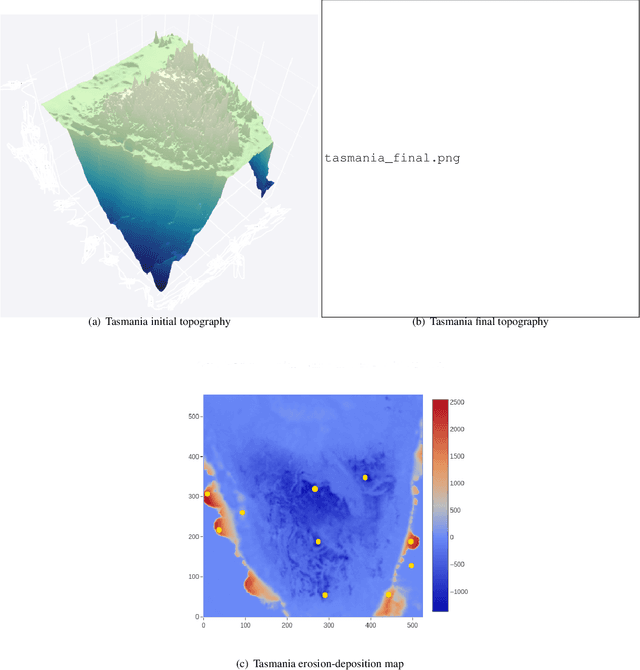
The complex and computationally expensive features of the forward landscape and sedimentary basin evolution models pose a major challenge in the development of efficient inference and optimization methods. Bayesian inference provides a methodology for estimation and uncertainty quantification of free model parameters. In our previous work, parallel tempering Bayeslands was developed as a framework for parameter estimation and uncertainty quantification for the landscape and basin evolution modelling software Badlands. Parallel tempering Bayeslands features high-performance computing with dozens of processing cores running in parallel to enhance computational efficiency. Although parallel computing is used, the procedure remains computationally challenging since thousands of samples need to be drawn and evaluated. In large-scale landscape and basin evolution problems, a single model evaluation can take from several minutes to hours, and in certain cases, even days. Surrogate-assisted optimization has been with successfully applied to a number of engineering problems. This motivates its use in optimisation and inference methods suited for complex models in geology and geophysics. Surrogates can speed up parallel tempering Bayeslands by developing computationally inexpensive surrogates to mimic expensive models. In this paper, we present an application of surrogate-assisted parallel tempering where that surrogate mimics a landscape evolution model including erosion, sediment transport and deposition, by estimating the likelihood function that is given by the model. We employ a machine learning model as a surrogate that learns from the samples generated by the parallel tempering algorithm. The results show that the methodology is effective in lowering the overall computational cost significantly while retaining the quality of solutions.
Teleoperation of a Humanoid Robot with Motion Imitation and Legged Locomotion
Dec 02, 2018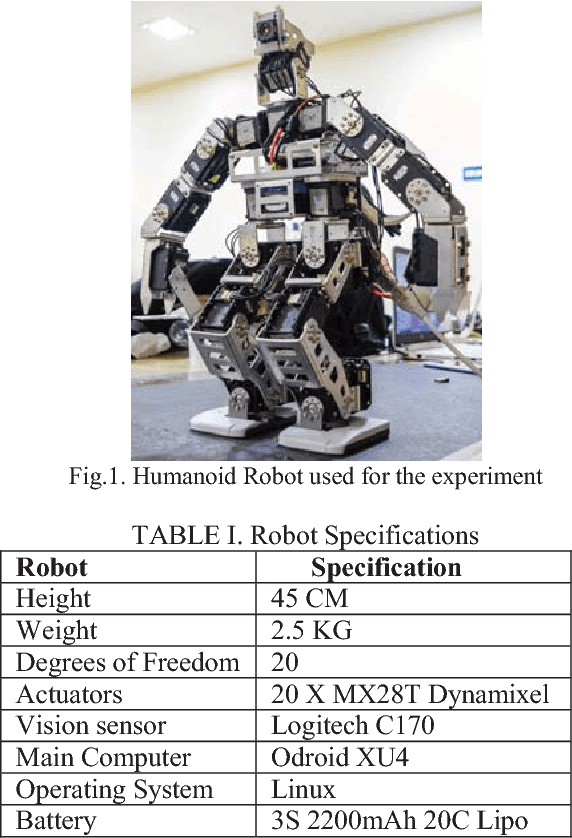
This work presents a teleoperated humanoid robot system that can imitate human motions, walk and turn. To capture human motions, a Microsoft Kinect Depth sensor is used. Unlike the cumbersome motion capture suits, the sensor makes the system more comfortable to interact with. The skeleton data is extracted from the Kinect which is processed to generate the robot's joint angles. Robot Operating System (ROS) is used for the communication between the various parts of the code to achieve minimal latency. Thus the robot imitates the human in real-time with negligible lag. Unlike most of the human motion imitation systems, this system is not stationary. The lower body motions of the user are captured and processed and used to make the robot walk forward, backward and to make it turn right or left thus enabling a completely dynamic teleoperated humanoid robot system.
Surrogate-assisted parallel tempering for Bayesian neural learning
Nov 21, 2018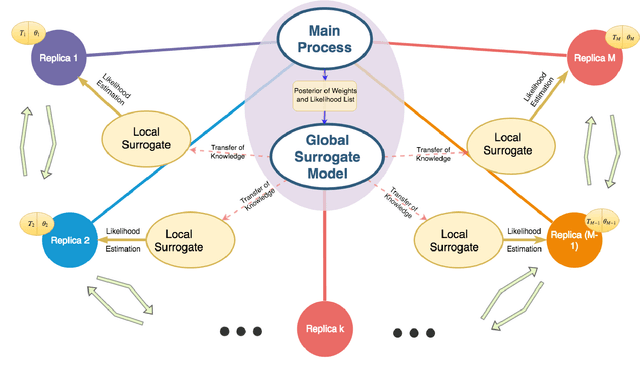
Parallel tempering addresses some of the drawbacks of canonical Markov Chain Monte-Carlo methods for Bayesian neural learning with the ability to utilize high performance computing. However, certain challenges remain given the large range of network parameters and big data. Surrogate-assisted optimization considers the estimation of an objective function for models given computational inefficiency or difficulty to obtain clear results. We address the inefficiency of parallel tempering for large-scale problems by combining parallel computing features with surrogate assisted estimation of likelihood function that describes the plausibility of a model parameter value, given specific observed data. In this paper, we present surrogate-assisted parallel tempering for Bayesian neural learning where the surrogates are used to estimate the likelihood. The estimation via the surrogate becomes useful rather than evaluating computationally expensive models that feature large number of parameters and datasets. Our results demonstrate that the methodology significantly lowers the computational cost while maintaining quality in decision making using Bayesian neural learning. The method has applications for a Bayesian inversion and uncertainty quantification for a broad range of numerical models.