 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Evaluation of Large Vision-Language Models for 2D Object Detection under SOTIF Conditions
Jan 30, 2026Reliable environmental perception remains one of the main obstacles for safe operation of automated vehicles. Safety of the Intended Functionality (SOTIF) concerns safety risks from perception insufficiencies, particularly under adverse conditions where conventional detectors often falter. While Large Vision-Language Models (LVLMs) demonstrate promising semantic reasoning, their quantitative effectiveness for safety-critical 2D object detection is underexplored. This paper presents a systematic evaluation of ten representative LVLMs using the PeSOTIF dataset, a benchmark specifically curated for long-tail traffic scenarios and environmental degradations. Performance is quantitatively compared against the classical perception approach, a YOLO-based detector. Experimental results reveal a critical trade-off: top-performing LVLMs (e.g., Gemini 3, Doubao) surpass the YOLO baseline in recall by over 25% in complex natural scenarios, exhibiting superior robustness to visual degradation. Conversely, the baseline retains an advantage in geometric precision for synthetic perturbations. These findings highlight the complementary strengths of semantic reasoning versus geometric regression, supporting the use of LVLMs as high-level safety validators in SOTIF-oriented automated driving systems.
Toward a Full-Stack Co-Simulation Platform for Testing of Automated Driving Systems
Jul 09, 2025Virtual testing has emerged as an effective approach to accelerate the deployment of automated driving systems. Nevertheless, existing simulation toolchains encounter difficulties in integrating rapid, automated scenario generation with simulation environments supporting advanced automated driving capabilities. To address this limitation, a full-stack toolchain is presented, enabling automatic scenario generation from real-world datasets and efficient validation through a co-simulation platform based on CarMaker, ROS, and Apollo. The simulation results demonstrate the effectiveness of the proposed toolchain. A demonstration video showcasing the toolchain is available at the provided link: https://youtu.be/taJw_-CmSiY.
A Communication-Latency-Aware Co-Simulation Platform for Safety and Comfort Evaluation of Cloud-Controlled ICVs
Jun 09, 2025Testing cloud-controlled intelligent connected vehicles (ICVs) requires simulation environments that faithfully emulate both vehicle behavior and realistic communication latencies. This paper proposes a latency-aware co-simulation platform integrating CarMaker and Vissim to evaluate safety and comfort under real-world vehicle-to-cloud (V2C) latency conditions. Two communication latency models, derived from empirical 5G measurements in China and Hungary, are incorporated and statistically modeled using Gamma distributions. A proactive conflict module (PCM) is proposed to dynamically control background vehicles and generate safety-critical scenarios. The platform is validated through experiments involving an exemplary system under test (SUT) across six testing conditions combining two PCM modes (enabled/disabled) and three latency conditions (none, China, Hungary). Safety and comfort are assessed using metrics including collision rate, distance headway, post-encroachment time, and the spectral characteristics of longitudinal acceleration. Results show that the PCM effectively increases driving environment criticality, while V2C latency primarily affects ride comfort. These findings confirm the platform's effectiveness in systematically evaluating cloud-controlled ICVs under diverse testing conditions.
Human-Machine Shared Control Approach for the Takeover of Cooperative Adaptive Cruise Control
Jul 16, 2024Cooperative Adaptive Cruise Control (CACC) often requires human takeover for tasks such as exiting a freeway. Direct human takeover can pose significant risks, especially given the close-following strategy employed by CACC, which might cause drivers to feel unsafe and execute hard braking, potentially leading to collisions. This research aims to develop a CACC takeover controller that ensures a smooth transition from automated to human control. The proposed CACC takeover maneuver employs an indirect human-machine shared control approach, modeled as a Stackelberg competition where the machine acts as the leader and the human as the follower. The machine guides the human to respond in a manner that aligns with the machine's expectations, aiding in maintaining following stability. Additionally, the human reaction function is integrated into the machine's predictive control system, moving beyond a simple "prediction-planning" pipeline to enhance planning optimality. The controller has been verified to i) enable a smooth takeover maneuver of CACC; ii) ensure string stability within a specific Operational Design Domain (ODD) when human control authority is below 32.7%; iii) enhance both perceived and actual safety through machine interventions; and iv) reduce the impact on upstream traffic by up to 60%.
Chat2Scenario: Scenario Extraction From Dataset Through Utilization of Large Language Model
Apr 26, 2024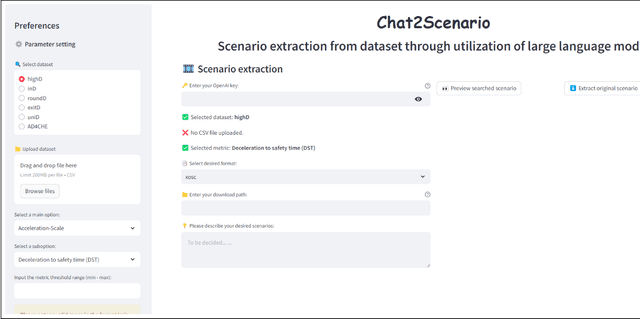
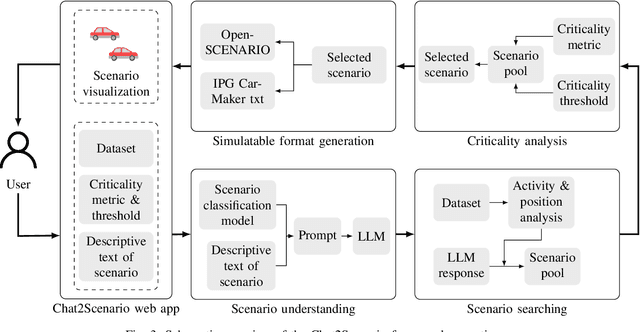
The advent of Large Language Models (LLM) provides new insights to validate Automated Driving Systems (ADS). In the herein-introduced work, a novel approach to extracting scenarios from naturalistic driving datasets is presented. A framework called Chat2Scenario is proposed leveraging the advanced Natural Language Processing (NLP) capabilities of LLM to understand and identify different driving scenarios. By inputting descriptive texts of driving conditions and specifying the criticality metric thresholds, the framework efficiently searches for desired scenarios and converts them into ASAM OpenSCENARIO and IPG CarMaker text files. This methodology streamlines the scenario extraction process and enhances efficiency. Simulations are executed to validate the efficiency of the approach. The framework is presented based on a user-friendly web app and is accessible via the following link: https://github.com/ftgTUGraz/Chat2Scenario.
Race Driver Evaluation at a Driving Simulator using a physical Model and a Machine Learning Approach
Jan 27, 2022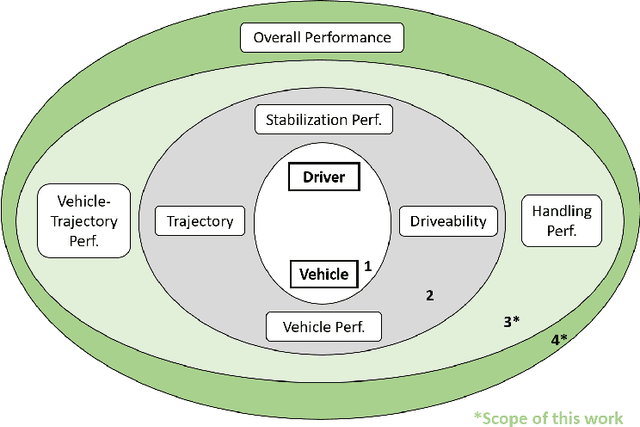
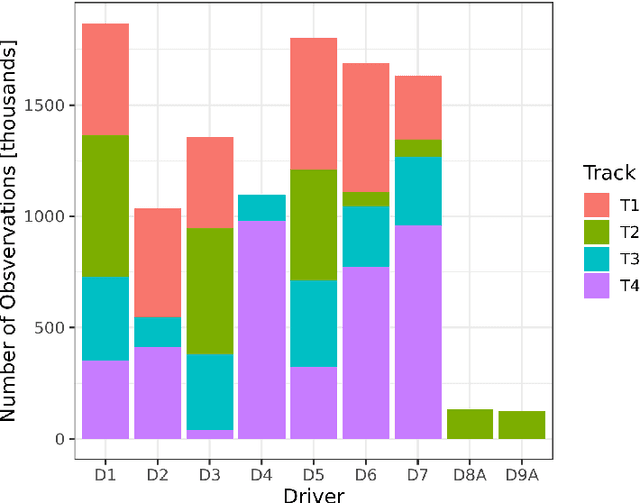
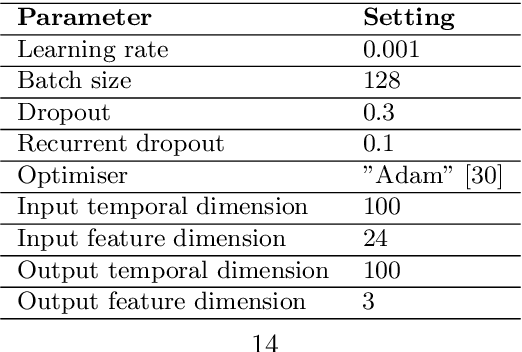
Professional race drivers are still superior to automated systems at controlling a vehicle at its dynamic limit. Gaining insight into race drivers' vehicle handling process might lead to further development in the areas of automated driving systems. We present a method to study and evaluate race drivers on a driver-in-the-loop simulator by analysing tire grip potential exploitation. Given initial data from a simulator run, two optimiser based on physical models maximise the horizontal vehicle acceleration or the tire forces, respectively. An overall performance score, a vehicle-trajectory score and a handling score are introduced to evaluate drivers. Our method is thereby completely track independent and can be used from one single corner up to a large data set. We apply the proposed method to a motorsport data set containing over 1200 laps from seven professional race drivers and two amateur drivers whose lap times are 10-20% slower. The difference to the professional drivers comes mainly from their inferior handling skills and not their choice of driving line. A downside of the presented method for certain applications is an extensive computation time. Therefore, we propose a Long-short-term memory (LSTM) neural network to estimate the driver evaluation scores. We show that the neural network is accurate and robust with a root-mean-square error between 2-5% and can replace the optimisation based method. The time for processing the data set considered in this work is reduced from 68 hours to 12 seconds, making the neural network suitable for real-time application.
Advanced Lane Detection Model for the Virtual Development of Highly Automated Functions
Apr 15, 2021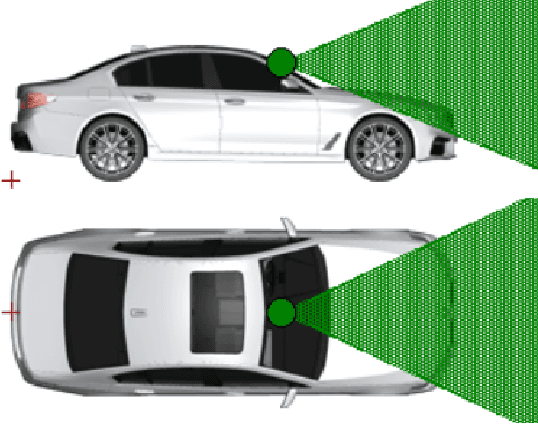
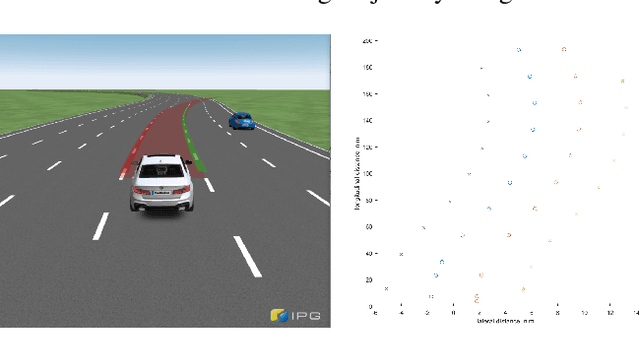

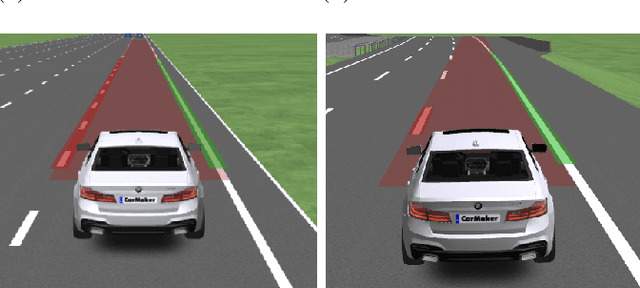
Virtual development and prototyping has already become an integral part in the field of automated driving systems (ADS). There are plenty of software tools that are used for the virtual development of ADS. One such tool is CarMaker from IPG Automotive, which is widely used in the scientific community and in the automotive industry. It offers a broad spectrum of implementation and modelling possibilities of the vehicle, driver behavior, control, sensors, and environmental models. Focusing on the virtual development of highly automated driving functions on the vehicle guidance level, it is essential to perceive the environment in a realistic manner. For the longitudinal and lateral path guidance line detection sensors are necessary for the determination of the relevant perceiving vehicle and for the planning of trajectories. For this purpose, a lane sensor model was developed in order to efficiently detect lanes in the simulation environment of CarMaker. The so-called advanced lane detection model (ALDM) is optimized regarding the calculation time and is for the lateral and longitudinal vehicle guidance in CarMaker.
Stress Testing Method for Scenario Based Testing of Automated Driving Systems
Dec 08, 2020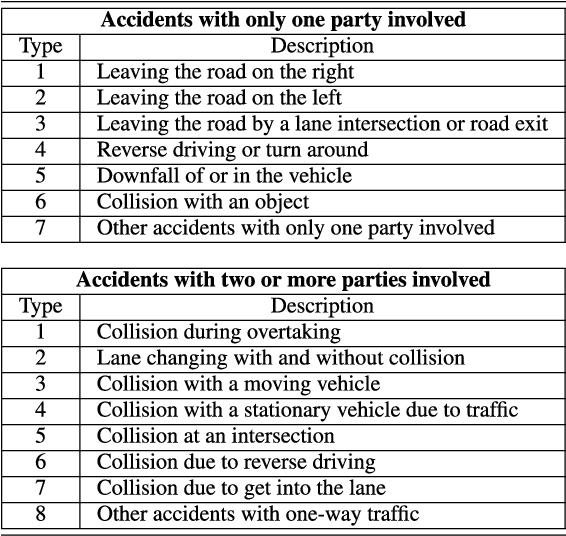
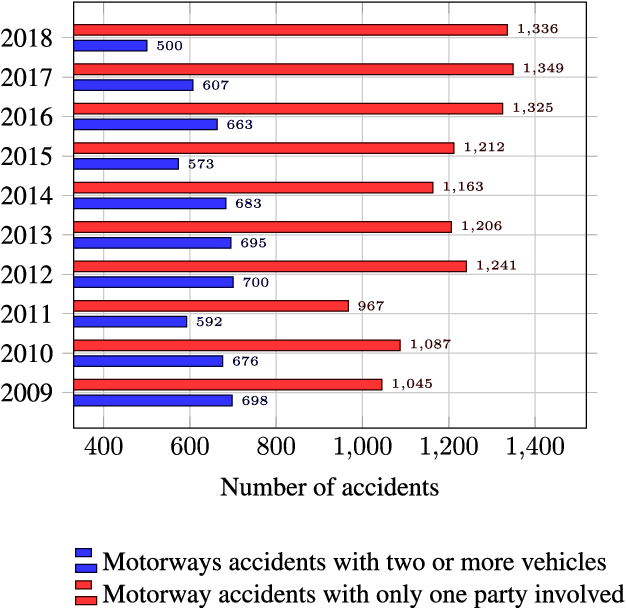
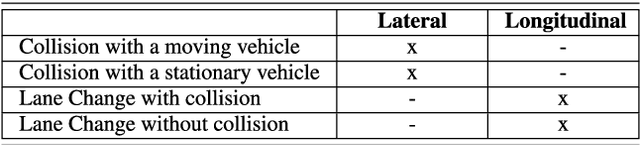
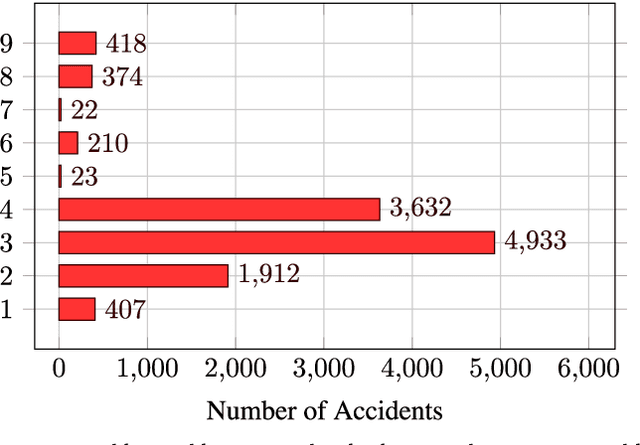
Classical approaches and procedures for testing of automated vehicles of SAE levels 1 and 2 were based on defined scenarios with specific maneuvers, depending on the function under test. For automated driving systems (ADS) of SAE level 3+, the scenario space is infinite and calling for virtual testing and verification. However, even in simulation, the generation of safety-relevant scenarios for ADS is expensive and time-consuming. This leads to a demand for stochastic and realistic traffic simulation. Therefore, microscopic traffic flow simulation models (TFSM) are becoming a crucial part of scenario-based testing of ADS. In this paper, a co-simulation between the multi-body simulation software IPG CarMaker and the microscopic traffic flow simulation software (TFSS) PTV Vissim is used. Although the TFSS could provide realistic and stochastic behavior of the traffic participants, safety-critical scenarios (SCS) occur rarely. In order to avoid this, a novel Stress Testing Method (STM) is introduced. With this method, traffic participants are manipulated via external driver DLL interface from PTV Vissim in the vicinity of the vehicle under test in order to provoke defined critical maneuvers derived from statistical accident data on highways in Austria. These external driver models imitate human driving errors, resulting in an increase of safety-critical scenarios. As a result, the presented STM method contributes to an increase of safety-relevant scenarios for verification, testing and assessment of ADS.