 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBringing the Algorithms to the Data -- Secure Distributed Medical Analytics using the Personal Health Train
Dec 07, 2022The need for data privacy and security -- enforced through increasingly strict data protection regulations -- renders the use of healthcare data for machine learning difficult. In particular, the transfer of data between different hospitals is often not permissible and thus cross-site pooling of data not an option. The Personal Health Train (PHT) paradigm proposed within the GO-FAIR initiative implements an 'algorithm to the data' paradigm that ensures that distributed data can be accessed for analysis without transferring any sensitive data. We present PHT-meDIC, a productively deployed open-source implementation of the PHT concept. Containerization allows us to easily deploy even complex data analysis pipelines (e.g, genomics, image analysis) across multiple sites in a secure and scalable manner. We discuss the underlying technological concepts, security models, and governance processes. The implementation has been successfully applied to distributed analyses of large-scale data, including applications of deep neural networks to medical image data.
Race Driver Evaluation at a Driving Simulator using a physical Model and a Machine Learning Approach
Jan 27, 2022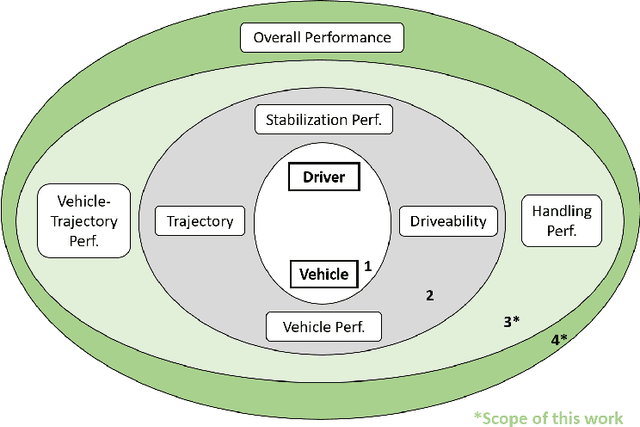
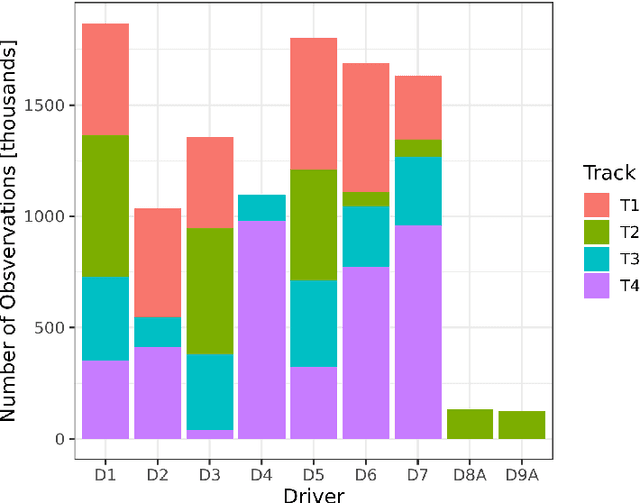
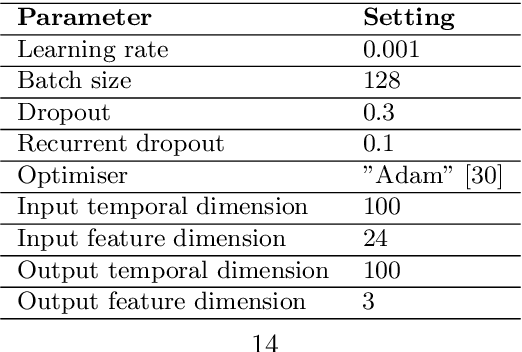
Professional race drivers are still superior to automated systems at controlling a vehicle at its dynamic limit. Gaining insight into race drivers' vehicle handling process might lead to further development in the areas of automated driving systems. We present a method to study and evaluate race drivers on a driver-in-the-loop simulator by analysing tire grip potential exploitation. Given initial data from a simulator run, two optimiser based on physical models maximise the horizontal vehicle acceleration or the tire forces, respectively. An overall performance score, a vehicle-trajectory score and a handling score are introduced to evaluate drivers. Our method is thereby completely track independent and can be used from one single corner up to a large data set. We apply the proposed method to a motorsport data set containing over 1200 laps from seven professional race drivers and two amateur drivers whose lap times are 10-20% slower. The difference to the professional drivers comes mainly from their inferior handling skills and not their choice of driving line. A downside of the presented method for certain applications is an extensive computation time. Therefore, we propose a Long-short-term memory (LSTM) neural network to estimate the driver evaluation scores. We show that the neural network is accurate and robust with a root-mean-square error between 2-5% and can replace the optimisation based method. The time for processing the data set considered in this work is reduced from 68 hours to 12 seconds, making the neural network suitable for real-time application.
Modeling Ice Friction for Vehicle Dynamics of a Bobsled with Application in Driver Evaluation and Driving Simulation
Sep 15, 2021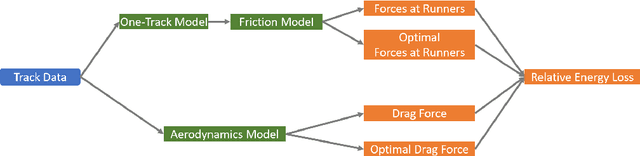


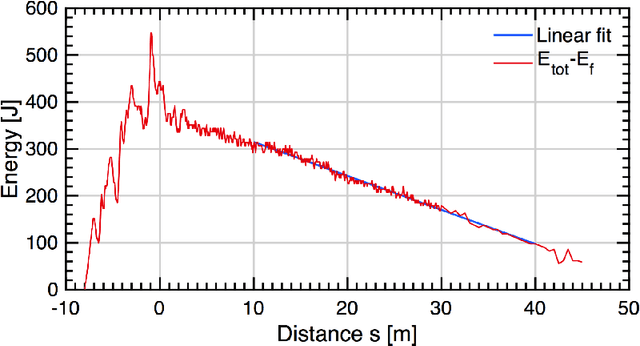
We provide an ice friction model for vehicle dynamics of a two-man bobsled which can be used for driver evaluation and in a driver-in-the-loop simulator. Longitudinal friction is modeled by combining experimental results with finite element simulations to yield a correlation between contact pressure and friction. To model lateral friction, we collect data from 44 bobsleigh runs using special sensors. Non-linear regression is used to fit a bob-specific one-track vehicle dynamics model to the data. It is applied in driving simulation and enables a novel method for bob driver evaluation. Bob drivers with various levels of experience are investigated. It shows that a similar performance of the top drivers results from different driving styles.