 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRace Driver Evaluation at a Driving Simulator using a physical Model and a Machine Learning Approach
Paper and Code
Jan 27, 2022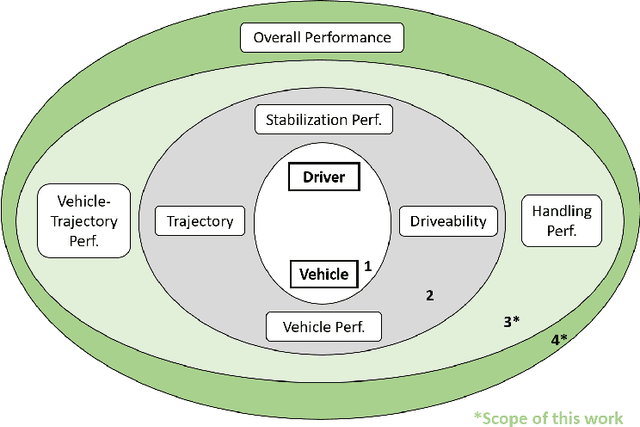
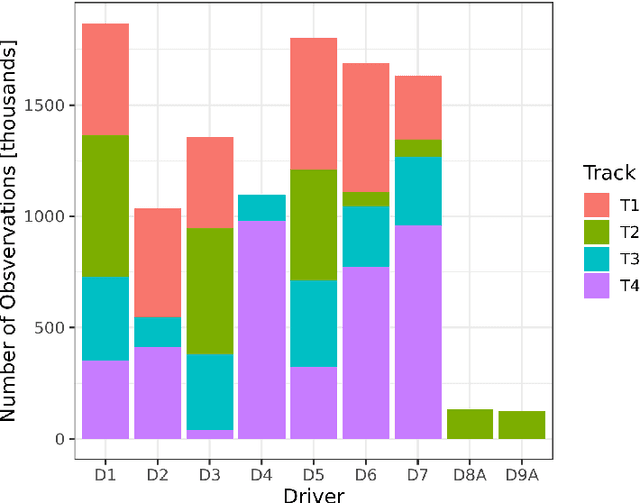
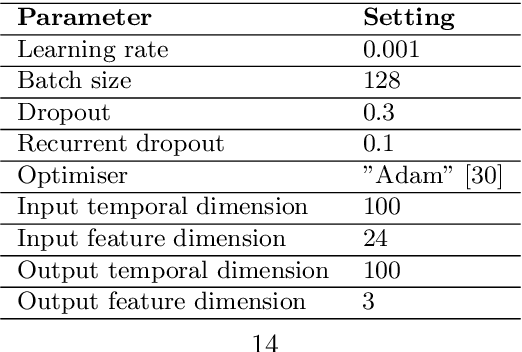
Professional race drivers are still superior to automated systems at controlling a vehicle at its dynamic limit. Gaining insight into race drivers' vehicle handling process might lead to further development in the areas of automated driving systems. We present a method to study and evaluate race drivers on a driver-in-the-loop simulator by analysing tire grip potential exploitation. Given initial data from a simulator run, two optimiser based on physical models maximise the horizontal vehicle acceleration or the tire forces, respectively. An overall performance score, a vehicle-trajectory score and a handling score are introduced to evaluate drivers. Our method is thereby completely track independent and can be used from one single corner up to a large data set. We apply the proposed method to a motorsport data set containing over 1200 laps from seven professional race drivers and two amateur drivers whose lap times are 10-20% slower. The difference to the professional drivers comes mainly from their inferior handling skills and not their choice of driving line. A downside of the presented method for certain applications is an extensive computation time. Therefore, we propose a Long-short-term memory (LSTM) neural network to estimate the driver evaluation scores. We show that the neural network is accurate and robust with a root-mean-square error between 2-5% and can replace the optimisation based method. The time for processing the data set considered in this work is reduced from 68 hours to 12 seconds, making the neural network suitable for real-time application.