 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Model-Free and Model-Based Learning-Informed Planning for PointGoal Navigation
Dec 17, 2022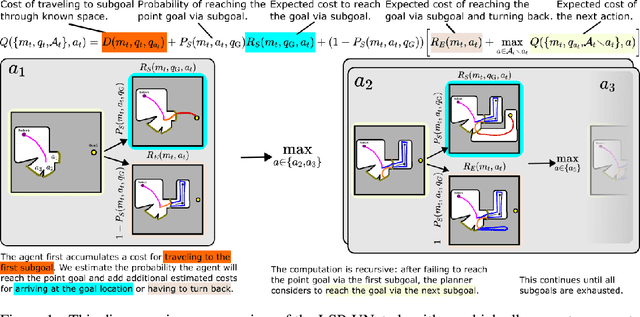
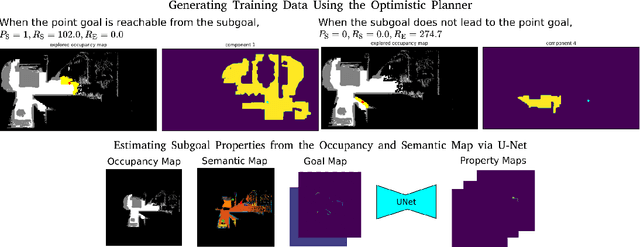
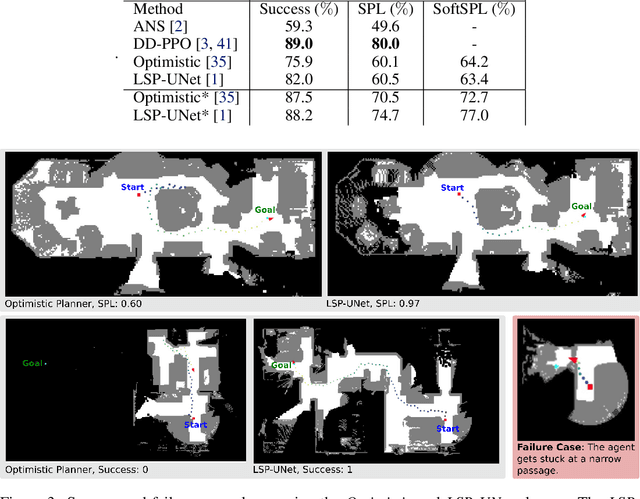
In recent years several learning approaches to point goal navigation in previously unseen environments have been proposed. They vary in the representations of the environments, problem decomposition, and experimental evaluation. In this work, we compare the state-of-the-art Deep Reinforcement Learning based approaches with Partially Observable Markov Decision Process (POMDP) formulation of the point goal navigation problem. We adapt the (POMDP) sub-goal framework proposed by [1] and modify the component that estimates frontier properties by using partial semantic maps of indoor scenes built from images' semantic segmentation. In addition to the well-known completeness of the model-based approach, we demonstrate that it is robust and efficient in that it leverages informative, learned properties of the frontiers compared to an optimistic frontier-based planner. We also demonstrate its data efficiency compared to the end-to-end deep reinforcement learning approaches. We compare our results against an optimistic planner, ANS and DD-PPO on Matterport3D dataset using the Habitat Simulator. We show comparable, though slightly worse performance than the SOTA DD-PPO approach, yet with far fewer data.
Learning-Augmented Model-Based Planning for Visual Exploration
Nov 15, 2022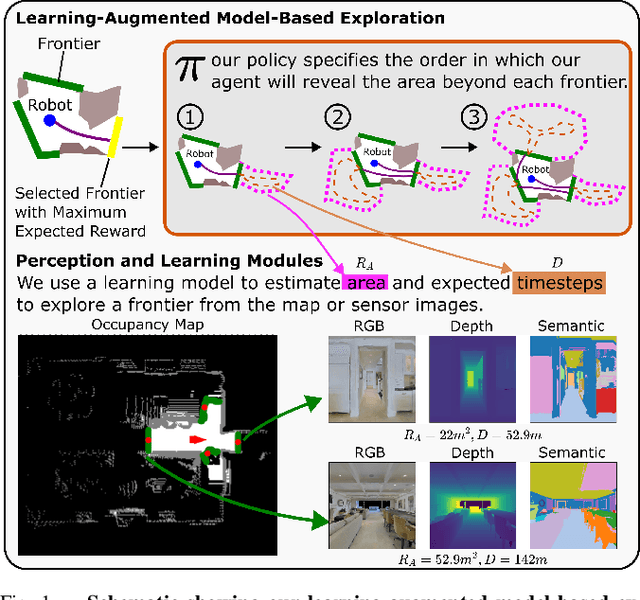



We consider the problem of time-limited robotic exploration in previously unseen environments where exploration is limited by a predefined amount of time. We propose a novel exploration approach using learning-augmented model-based planning. We generate a set of subgoals associated with frontiers on the current map and derive a Bellman Equation for exploration with these subgoals. Visual sensing and advances in semantic mapping of indoor scenes are exploited for training a deep convolutional neural network to estimate properties associated with each frontier: the expected unobserved area beyond the frontier and the expected timesteps (discretized actions) required to explore it. The proposed model-based planner is guaranteed to explore the whole scene if time permits. We thoroughly evaluate our approach on a large-scale pseudo-realistic indoor dataset (Matterport3D) with the Habitat simulator. We compare our approach with classical and more recent RL-based exploration methods, demonstrating its clear advantages in several settings.
Towards More Equitable Question Answering Systems: How Much More Data Do You Need?
May 28, 2021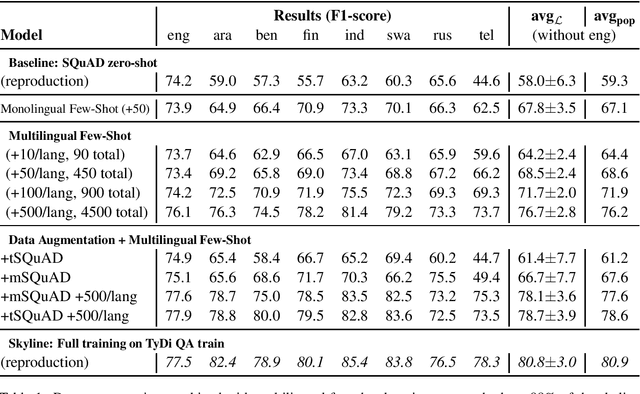
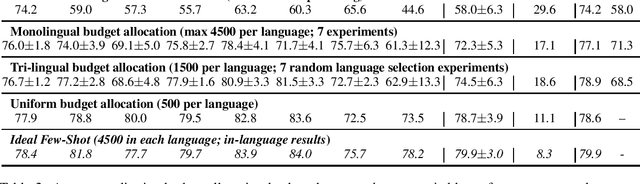


Question answering (QA) in English has been widely explored, but multilingual datasets are relatively new, with several methods attempting to bridge the gap between high- and low-resourced languages using data augmentation through translation and cross-lingual transfer. In this project, we take a step back and study which approaches allow us to take the most advantage of existing resources in order to produce QA systems in many languages. Specifically, we perform extensive analysis to measure the efficacy of few-shot approaches augmented with automatic translations and permutations of context-question-answer pairs. In addition, we make suggestions for future dataset development efforts that make better use of a fixed annotation budget, with a goal of increasing the language coverage of QA datasets and systems. Code and data for reproducing our experiments are available here: https://github.com/NavidRajabi/EMQA.