 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREBEL: Rule-based and Experience-enhanced Learning with LLMs for Initial Task Allocation in Multi-Human Multi-Robot Teams
Sep 24, 2024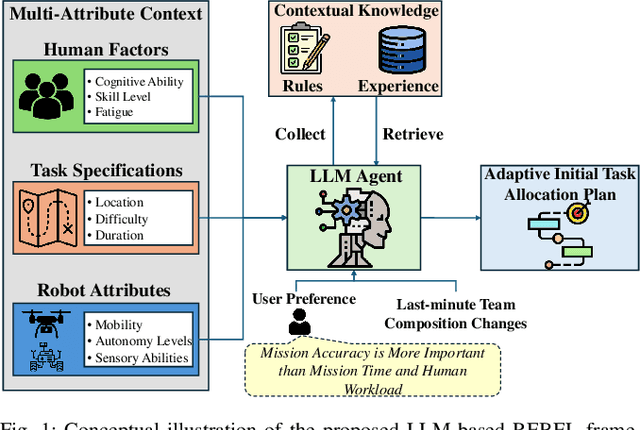
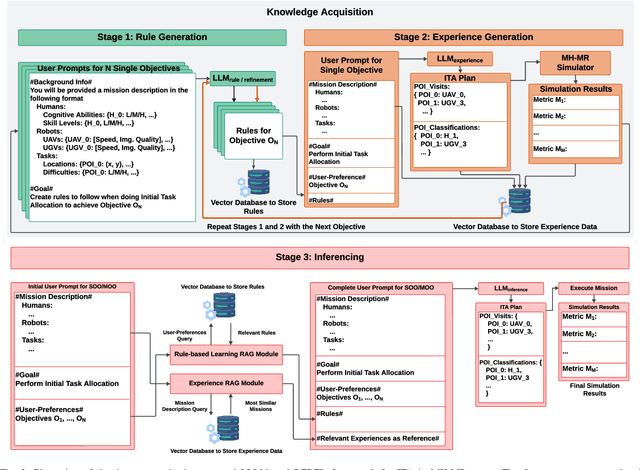
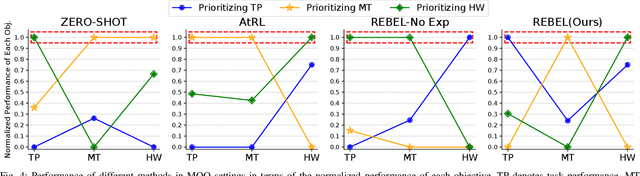
Multi-human multi-robot teams combine the complementary strengths of humans and robots to tackle complex tasks across diverse applications. However, the inherent heterogeneity of these teams presents significant challenges in initial task allocation (ITA), which involves assigning the most suitable tasks to each team member based on their individual capabilities before task execution. While current learning-based methods have shown promising results, they are often computationally expensive to train, and lack the flexibility to incorporate user preferences in multi-objective optimization and adapt to last-minute changes in real-world dynamic environments. To address these issues, we propose REBEL, an LLM-based ITA framework that integrates rule-based and experience-enhanced learning. By leveraging Retrieval-Augmented Generation, REBEL dynamically retrieves relevant rules and past experiences, enhancing reasoning efficiency. Additionally, REBEL can complement pre-trained RL-based ITA policies, improving situational awareness and overall team performance. Extensive experiments validate the effectiveness of our approach across various settings. More details are available at https://sites.google.com/view/ita-rebel .
Initial Task Assignment in Multi-Human Multi-Robot Teams: An Attention-enhanced Hierarchical Reinforcement Learning Approach
Oct 08, 2023



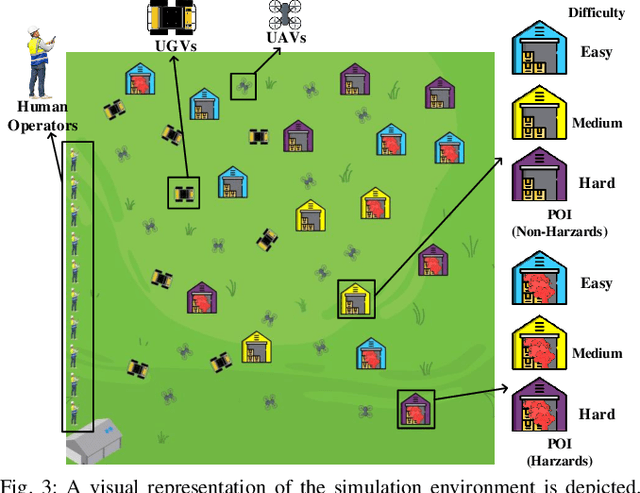
Multi-human multi-robot teams (MH-MR) obtain tremendous potential in tackling intricate and massive missions by merging distinct strengths and expertise of individual members. The inherent heterogeneity of these teams necessitates advanced initial task assignment (ITA) methods that align tasks with the intrinsic capabilities of team members from the outset. While existing reinforcement learning approaches show encouraging results, they might fall short in addressing the nuances of long-horizon ITA problems, particularly in settings with large-scale MH-MR teams or multifaceted tasks. To bridge this gap, we propose an attention-enhanced hierarchical reinforcement learning approach that decomposes the complex ITA problem into structured sub-problems, facilitating more efficient allocations. To bolster sub-policy learning, we introduce a hierarchical cross-attribute attention (HCA) mechanism, encouraging each sub-policy within the hierarchy to discern and leverage the specific nuances in the state space that are crucial for its respective decision-making phase. Through an extensive environmental surveillance case study, we demonstrate the benefits of our model and the HCA inside.