 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeODYN: An All-Shifted Non-Interior-Point Method for Quadratic Programming in Robotics and AI
Feb 17, 2026We introduce ODYN, a novel all-shifted primal-dual non-interior-point quadratic programming (QP) solver designed to efficiently handle challenging dense and sparse QPs. ODYN combines all-shifted nonlinear complementarity problem (NCP) functions with proximal method of multipliers to robustly address ill-conditioned and degenerate problems, without requiring linear independence of the constraints. It exhibits strong warm-start performance and is well suited to both general-purpose optimization, and robotics and AI applications, including model-based control, estimation, and kernel-based learning methods. We provide an open-source implementation and benchmark ODYN on the Maros-Mészáros test set, demonstrating state-of-the-art convergence performance in small-to-high-scale problems. The results highlight ODYN's superior warm-starting capabilities, which are critical in sequential and real-time settings common in robotics and AI. These advantages are further demonstrated by deploying ODYN as the backend of an SQP-based predictive control framework (OdynSQP), as the implicitly differentiable optimization layer for deep learning (ODYNLayer), and the optimizer of a contact-dynamics simulation (ODYNSim).
QuantGraph: A Receding-Horizon Quantum Graph Solver
Dec 17, 2025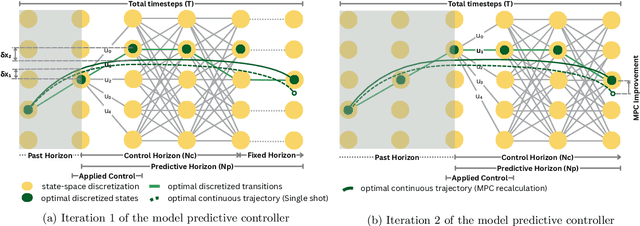
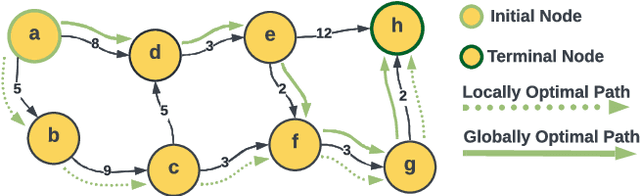
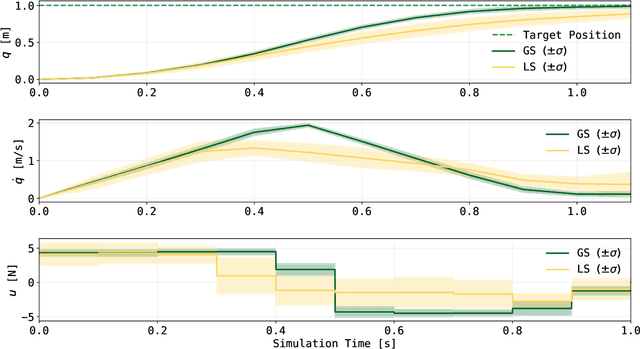
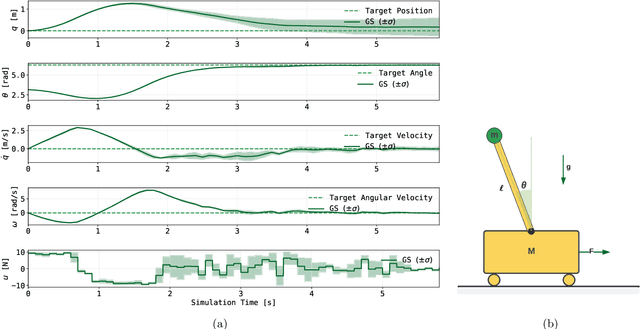
Dynamic programming is a cornerstone of graph-based optimization. While effective, it scales unfavorably with problem size. In this work, we present QuantGraph, a two-stage quantum-enhanced framework that casts local and global graph-optimization problems as quantum searches over discrete trajectory spaces. The solver is designed to operate efficiently by first finding a sequence of locally optimal transitions in the graph (local stage), without considering full trajectories. The accumulated cost of these transitions acts as a threshold that prunes the search space (up to 60% reduction for certain examples). The subsequent global stage, based on this threshold, refines the solution. Both stages utilize variants of the Grover-adaptive-search algorithm. To achieve scalability and robustness, we draw on principles from control theory and embed QuantGraph's global stage within a receding-horizon model-predictive-control scheme. This classical layer stabilizes and guides the quantum search, improving precision and reducing computational burden. In practice, the resulting closed-loop system exhibits robust behavior and lower overall complexity. Notably, for a fixed query budget, QuantGraph attains a 2x increase in control-discretization precision while still benefiting from Grover-search's inherent quadratic speedup compared to classical methods.
Learning Physical Systems: Symplectification via Gauge Fixing in Dirac Structures
Jun 23, 2025

Physics-informed deep learning has achieved remarkable progress by embedding geometric priors, such as Hamiltonian symmetries and variational principles, into neural networks, enabling structure-preserving models that extrapolate with high accuracy. However, in systems with dissipation and holonomic constraints, ubiquitous in legged locomotion and multibody robotics, the canonical symplectic form becomes degenerate, undermining the very invariants that guarantee stability and long-term prediction. In this work, we tackle this foundational limitation by introducing Presymplectification Networks (PSNs), the first framework to learn the symplectification lift via Dirac structures, restoring a non-degenerate symplectic geometry by embedding constrained systems into a higher-dimensional manifold. Our architecture combines a recurrent encoder with a flow-matching objective to learn the augmented phase-space dynamics end-to-end. We then attach a lightweight Symplectic Network (SympNet) to forecast constrained trajectories while preserving energy, momentum, and constraint satisfaction. We demonstrate our method on the dynamics of the ANYmal quadruped robot, a challenging contact-rich, multibody system. To the best of our knowledge, this is the first framework that effectively bridges the gap between constrained, dissipative mechanical systems and symplectic learning, unlocking a whole new class of geometric machine learning models, grounded in first principles yet adaptable from data.
MetaSym: A Symplectic Meta-learning Framework for Physical Intelligence
Feb 23, 2025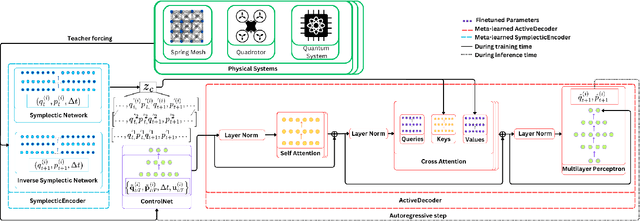

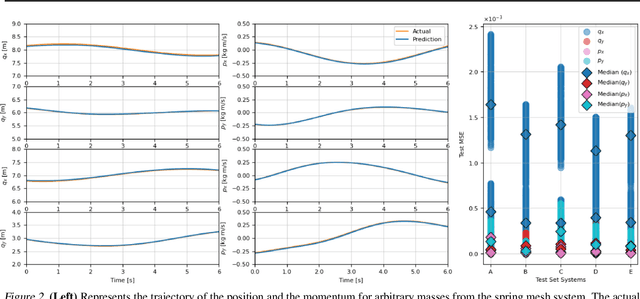

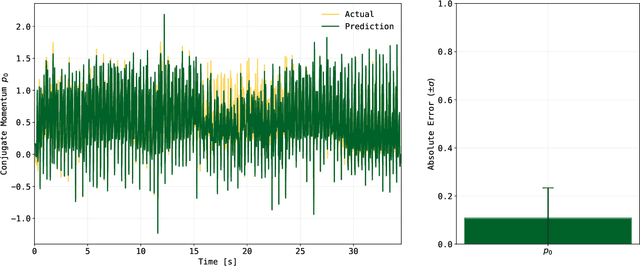
Scalable and generalizable physics-aware deep learning has long been considered a significant challenge with various applications across diverse domains ranging from robotics to molecular dynamics. Central to almost all physical systems are symplectic forms, the geometric backbone that underpins fundamental invariants like energy and momentum. In this work, we introduce a novel deep learning architecture, MetaSym. In particular, MetaSym combines a strong symplectic inductive bias obtained from a symplectic encoder and an autoregressive decoder with meta-attention. This principled design ensures that core physical invariants remain intact while allowing flexible, data-efficient adaptation to system heterogeneities. We benchmark MetaSym on highly varied datasets such as a high-dimensional spring mesh system (Otness et al., 2021), an open quantum system with dissipation and measurement backaction, and robotics-inspired quadrotor dynamics. Our results demonstrate superior performance in modeling dynamics under few-shot adaptation, outperforming state-of-the-art baselines with far larger models.
Gaitor: Learning a Unified Representation Across Gaits for Real-World Quadruped Locomotion
May 29, 2024



The current state-of-the-art in quadruped locomotion is able to produce robust motion for terrain traversal but requires the segmentation of a desired robot trajectory into a discrete set of locomotion skills such as trot and crawl. In contrast, in this work we demonstrate the feasibility of learning a single, unified representation for quadruped locomotion enabling continuous blending between gait types and characteristics. We present Gaitor, which learns a disentangled representation of locomotion skills, thereby sharing information common to all gait types seen during training. The structure emerging in the learnt representation is interpretable in that it is found to encode phase correlations between the different gait types. These can be leveraged to produce continuous gait transitions. In addition, foot swing characteristics are disentangled and directly addressable. Together with a rudimentary terrain encoding and a learned planner operating in this structured latent representation, Gaitor is able to take motion commands including desired gait type and characteristics from a user while reacting to uneven terrain. We evaluate Gaitor in both simulated and real-world settings on the ANYmal C platform. To the best of our knowledge, this is the first work learning such a unified and interpretable latent representation for multiple gaits, resulting in on-demand continuous blending between different locomotion modes on a real quadruped robot.
Towards Agility: A Momentum Aware Trajectory Optimisation Framework using Full-Centroidal Dynamics & Implicit Inverse Kinematics
Oct 09, 2023



Online planning and execution of acrobatic maneuvers pose significant challenges in legged locomotion. Their underlying combinatorial nature, along with the current hardware's limitations constitute the main obstacles in unlocking the true potential of legged-robots. This letter tries to expose the intricacies of these optimal control problems in a tangible way, directly applicable to the creation of more efficient online trajectory optimisation frameworks. By analysing the fundamental principles that shape the behaviour of the system, the dynamics themselves can be exploited to surpass its hardware limitations. More specifically, a trajectory optimisation formulation is proposed that exploits the system's high-order nonlinearities, such as the nonholonomy of the angular momentum, and phase-space symmetries in order to produce feasible high-acceleration maneuvers. By leveraging the full-centroidal dynamics of the quadruped ANYmal C and directly optimising its footholds and contact forces, the framework is capable of producing efficient motion plans with low computational overhead. The feasibility of the produced trajectories is ensured by taking into account the configuration-dependent inertial properties of the robot during the planning process, while its robustness is increased by supplying the full analytic derivatives & hessians to the solver. Finally, a significant portion of the discussion is centred around the deployment of the proposed framework on the ANYmal C platform, while its true capabilities are demonstrated through real-world experiments, with the successful execution of high-acceleration motion scenarios like the squat-jump.