 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Camera Visual-Inertial Simultaneous Localization and Mapping for Autonomous Valet Parking
Apr 27, 2023



Localization and mapping are key capabilities for self-driving vehicles. This paper describes a visual-inertial SLAM system that estimates an accurate and globally consistent trajectory of the vehicle and reconstructs a dense model of the free space surrounding the car. Towards this goal, we build on Kimera and extend it to use multiple cameras as well as external (e.g. wheel) odometry sensors, to obtain accurate and robust odometry estimates in real-world problems. Additionally, we propose an effective scheme for closing loops that circumvents the drawbacks of common alternatives based on the Perspective-n-Point method and also works with a single monocular camera. Finally, we develop a method for dense 3D mapping of the free space that combines a segmentation network for free-space detection with a homography-based dense mapping technique. We test our system on photo-realistic simulations and on several real datasets collected by a car prototype developed by the Ford Motor Company, spanning both indoor and outdoor parking scenarios. Our multi-camera system is shown to outperform state-of-the art open-source visual-inertial-SLAM pipelines (Vins-Fusion, ORB-SLAM3), and exhibits an average trajectory error under 1% of the trajectory length across more than 8 km of distance traveled (combined across all datasets). A video showcasing the system is available here: youtu.be/H8CpzDpXOI8
Intrinsic Isometric Manifold Learning with Application to Localization
Jul 04, 2018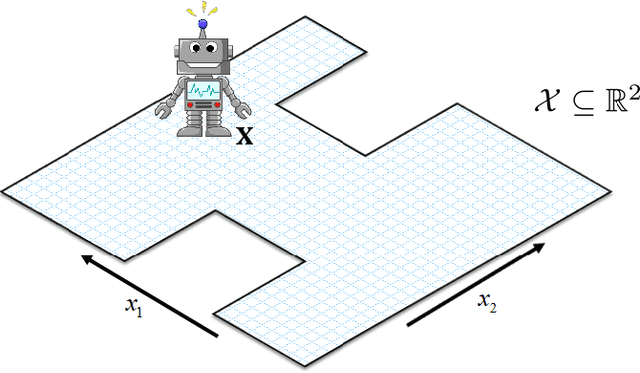
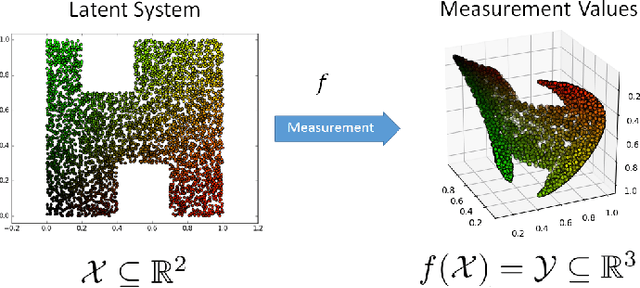
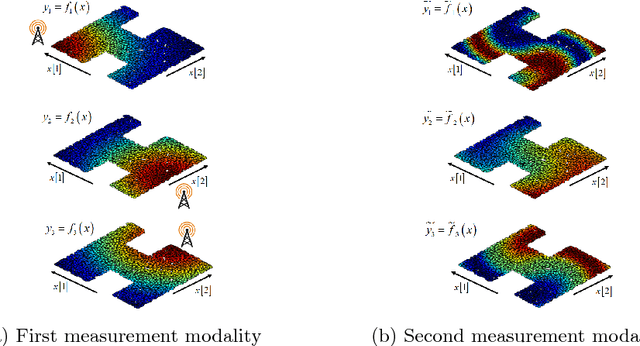
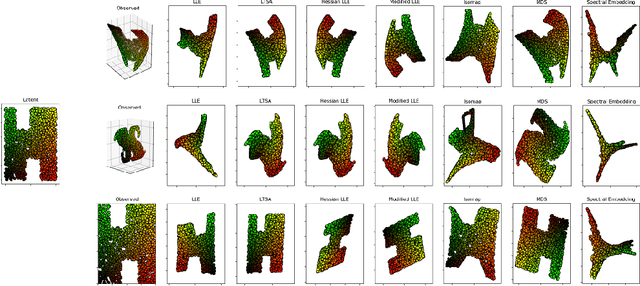
Data living on manifolds commonly appear in many applications. Often this results from an inherently latent low-dimensional system being observed through higher dimensional measurements. We show that under certain conditions, it is possible to construct an intrinsic and isometric data representation, which respects an underlying latent intrinsic geometry. Namely, we view the observed data only as a proxy and learn the structure of a latent unobserved intrinsic manifold, whereas common practice is to learn the manifold of the observed data. For this purpose, we build a new metric and propose a method for its robust estimation by assuming mild statistical priors and by using artificial neural networks as a mechanism for metric regularization and parametrization. We show successful application to unsupervised indoor localization in ad-hoc sensor networks. Specifically, we show that our proposed method facilitates accurate localization of a moving agent from imaging data it collects. Importantly, our method is applied in the same way to two different imaging modalities, thereby demonstrating its intrinsic and modality-invariant capabilities.