 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Body Model based ID using Shape and Pose Parameters
Dec 06, 2023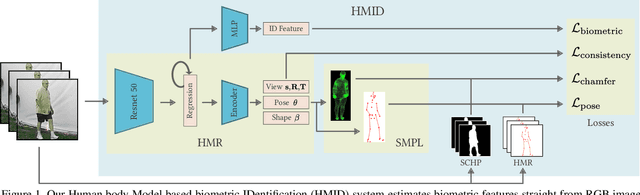
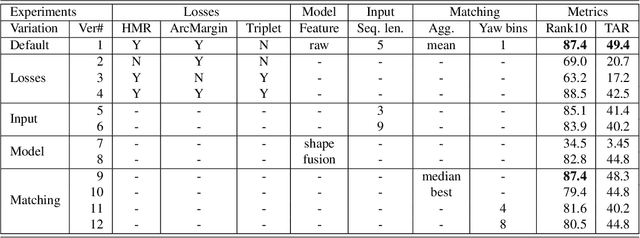
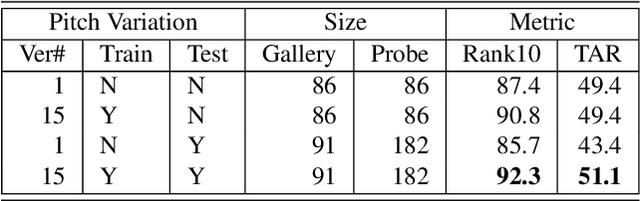
We present a Human Body model based IDentification system (HMID) system that is jointly trained for shape, pose and biometric identification. HMID is based on the Human Mesh Recovery (HMR) network and we propose additional losses to improve and stabilize shape estimation and biometric identification while maintaining the pose and shape output. We show that when our HMID network is trained using additional shape and pose losses, it shows a significant improvement in biometric identification performance when compared to an identical model that does not use such losses. The HMID model uses raw images instead of silhouettes and is able to perform robust recognition on images collected at range and altitude as many anthropometric properties are reasonably invariant to clothing, view and range. We show results on the USF dataset as well as the BRIAR dataset which includes probes with both clothing and view changes. Our approach (using body model losses) shows a significant improvement in Rank20 accuracy and True Accuracy Rate on the BRIAR evaluation dataset.
Sensor Control for Information Gain in Dynamic, Sparse and Partially Observed Environments
Nov 03, 2022
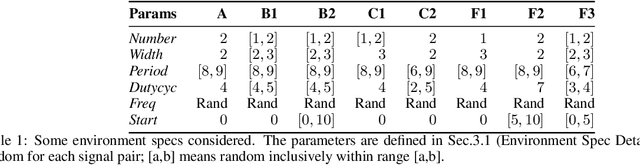


We present an approach for autonomous sensor control for information gathering under partially observable, dynamic and sparsely sampled environments. We consider the problem of controlling a sensor that makes partial observations in some space of interest such that it maximizes information about entities present in that space. We describe our approach for the task of Radio-Frequency (RF) spectrum monitoring, where the goal is to search for and track unknown, dynamic signals in the environment. To this end, we develop and demonstrate enhancements of the Deep Anticipatory Network (DAN) Reinforcement Learning (RL) framework that uses prediction and information-gain rewards to learn information-maximization policies in reward-sparse environments. We also extend this problem to situations in which taking samples from the actual RF spectrum/field is limited and expensive, and propose a model-based version of the original RL algorithm that fine-tunes the controller using a model of the environment that is iteratively improved from limited samples taken from the RF field. Our approach was thoroughly validated by testing against baseline expert-designed controllers in simulated RF environments of different complexity, using different rewards schemes and evaluation metrics. The results show that our system outperforms the standard DAN architecture and is more flexible and robust than several hand-coded agents. We also show that our approach is adaptable to non-stationary environments where the agent has to learn to adapt to changes from the emitting sources.