 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Motion Artifact Check for MRI (AutoMAC-MRI): An Interpretable Framework for Motion Artifact Detection and Severity Assessment
Dec 17, 2025Motion artifacts degrade MRI image quality and increase patient recalls. Existing automated quality assessment methods are largely limited to binary decisions and provide little interpretability. We introduce AutoMAC-MRI, an explainable framework for grading motion artifacts across heterogeneous MR contrasts and orientations. The approach uses supervised contrastive learning to learn a discriminative representation of motion severity. Within this feature space, we compute grade-specific affinity scores that quantify an image's proximity to each motion grade, thereby making grade assignments transparent and interpretable. We evaluate AutoMAC-MRI on more than 5000 expert-annotated brain MRI slices spanning multiple contrasts and views. Experiments assessing affinity scores against expert labels show that the scores align well with expert judgment, supporting their use as an interpretable measure of motion severity. By coupling accurate grade detection with per-grade affinity scoring, AutoMAC-MRI enables inline MRI quality control, with the potential to reduce unnecessary rescans and improve workflow efficiency.
Display Field-Of-View Agnostic Robust CT Kernel Synthesis Using Model-Based Deep Learning
Feb 19, 2025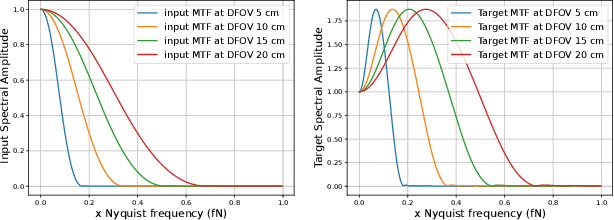
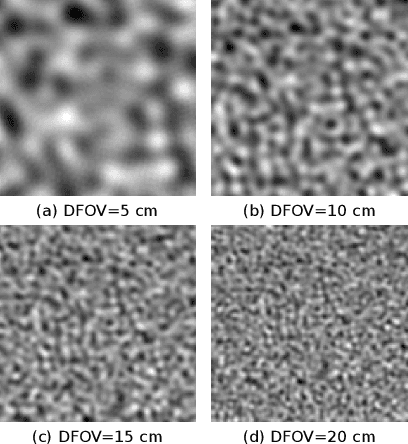
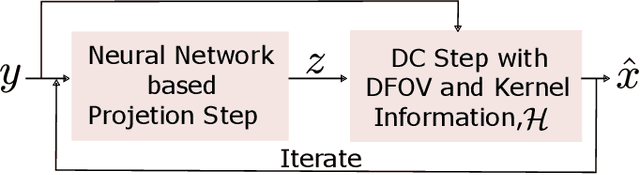
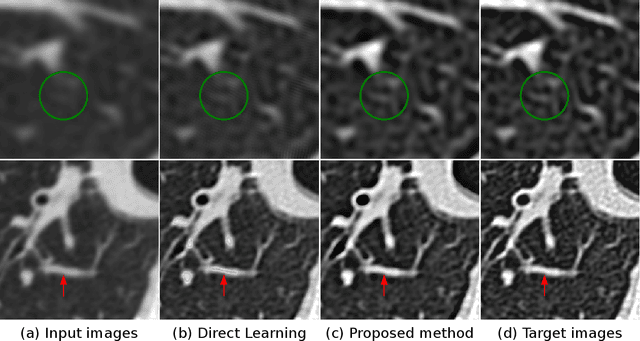
In X-ray computed tomography (CT) imaging, the choice of reconstruction kernel is crucial as it significantly impacts the quality of clinical images. Different kernels influence spatial resolution, image noise, and contrast in various ways. Clinical applications involving lung imaging often require images reconstructed with both soft and sharp kernels. The reconstruction of images with different kernels requires raw sinogram data and storing images for all kernels increases processing time and storage requirements. The Display Field-of-View (DFOV) adds complexity to kernel synthesis, as data acquired at different DFOVs exhibit varying levels of sharpness and details. This work introduces an efficient, DFOV-agnostic solution for image-based kernel synthesis using model-based deep learning. The proposed method explicitly integrates CT kernel and DFOV characteristics into the forward model. Experimental results on clinical data, along with quantitative analysis of the estimated modulation transfer function using wire phantom data, clearly demonstrate the utility of the proposed method in real-time. Additionally, a comparative study with a direct learning network, that lacks forward model information, shows that the proposed method is more robust to DFOV variations.
Label Sharing Incremental Learning Framework for Independent Multi-Label Segmentation Tasks
Nov 17, 2024



In a setting where segmentation models have to be built for multiple datasets, each with its own corresponding label set, a straightforward way is to learn one model for every dataset and its labels. Alternatively, multi-task architectures with shared encoders and multiple segmentation heads or shared weights with compound labels can also be made use of. This work proposes a novel label sharing framework where a shared common label space is constructed and each of the individual label sets are systematically mapped to the common labels. This transforms multiple datasets with disparate label sets into a single large dataset with shared labels, and therefore all the segmentation tasks can be addressed by learning a single model. This eliminates the need for task specific adaptations in network architectures and also results in parameter and data efficient models. Furthermore, label sharing framework is naturally amenable for incremental learning where segmentations for new datasets can be easily learnt. We experimentally validate our method on various medical image segmentation datasets, each involving multi-label segmentation. Furthermore, we demonstrate the efficacy of the proposed method in terms of performance and incremental learning ability vis-a-vis alternative methods.
Towards Non-contact 3D Ultrasound for Wrist Imaging
Oct 06, 2023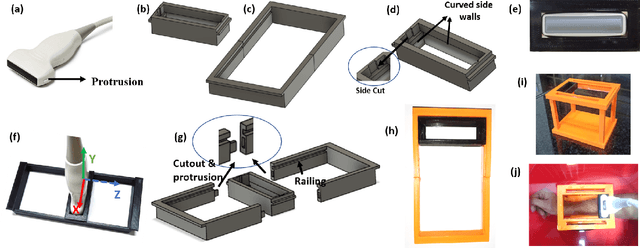

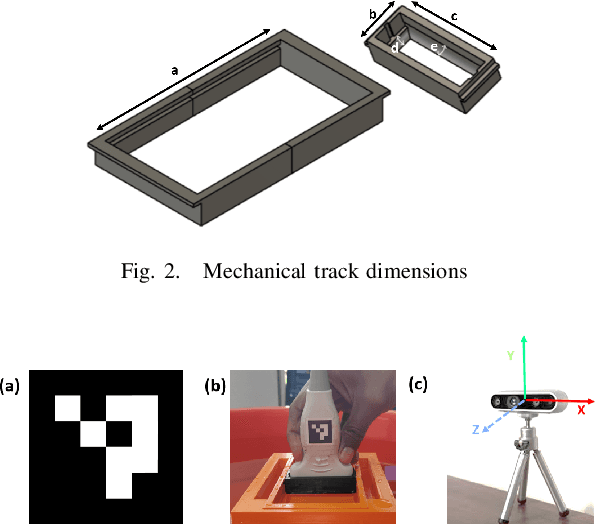
Objective: The objective of this work is an attempt towards non-contact freehand 3D ultrasound imaging with minimal complexity added to the existing point of care ultrasound (POCUS) systems. Methods: This study proposes a novel approach of using a mechanical track for non-contact ultrasound (US) scanning. The approach thus restricts the probe motion to a linear plane, to simplify the acquisition and 3D reconstruction process. A pipeline for US 3D volume reconstruction employing an US research platform and a GPU-based edge device is developed. Results: The efficacy of the proposed approach is demonstrated through ex-vivo and in-vivo experiments. Conclusion: The proposed approach with the adjustable field of view capability, non-contact design, and low cost of deployment without significantly altering the existing setup would open doors for up gradation of traditional systems to a wide range of 3D US imaging applications. Significance: Ultrasound (US) imaging is a popular clinical imaging modality for the point-of-care bedside imaging, particularly of the wrist/knee in the pediatric population due to its non-invasive and radiation free nature. However, the limited views of tissue structures obtained with 2D US in such scenarios make the diagnosis challenging. To overcome this, 3D US imaging which uses 2D US images and their orientation/position to reconstruct 3D volumes was developed. The accurate position estimation of the US probe at low cost has always stood as a challenging task in 3D reconstruction. Additionally, US imaging involves contact, which causes difficulty to pediatric subjects while monitoring live fractures or open wounds. Towards overcoming these challenges, a novel framework is attempted in this work.
A Simplified 3D Ultrasound Freehand Imaging Framework Using 1D Linear Probe and Low-Cost Mechanical Track
Feb 16, 2023Ultrasound imaging is the most popular medical imaging modality for point-of-care bedside imaging. However, 2D ultrasound imaging provides only limited views of the organ of interest, making diagnosis challenging. To overcome this, 3D ultrasound imaging was developed, which uses 2D ultrasound images and their orientation/position to reconstruct 3D volumes. The accurate position estimation of the ultrasound probe at low cost has always stood as a challenging task in 3D reconstruction. In this study, we propose a novel approach of using a mechanical track for ultrasound scanning, which restricts the probe motion to a linear plane, simplifying the acquisition and hence the reconstruction process. We also present an end-to-end pipeline for 3D ultrasound volume reconstruction and demonstrate its efficacy with an in-vitro tube phantom study and an ex-vivo bone experiment. The comparison between a sensorless freehand and the proposed mechanical track based acquisition is available online (shorturl.at/jqvX0).