 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrthogonal Linear Array based Product Beamforming for Real Time Underwater 3D Acoustical Imaging
Nov 14, 2024



Ocean exploration using acoustical 3D imaging is gaining popularity as it provides information about the 3D geometry of the targets even under mild turbid conditions. A major challenge in underwater 3D imaging is the high cost of the planar arrays and the computational complexity of the image reconstruction algorithms. In this work, we introduce two novel aspects, an L shaped array and a quadrant based time domain receive beamforming with a focus on achieving relatively low computational complexity for real-time 3D imaging in underwater environments. An orthogonal combination of two linear arrays to form an L shape is used to perform two independent and parallel 2D delay and sum beamforming and the 3D image of the target is reconstructed using the product of the resulting beams. In the proposed quadrant-based beamforming, each quadrant in the imaging slice is reconstructed in parallel using the orthogonal L-shaped linear arrays which reside at the edges of the planar array for the quadrant to be reconstructed. The proposed L-array solves the multiple-target ambiguity issue of the cross-array and an L-array placed at the center of the uniform planar array. The proposed method has reduced the main lobe width by 1 degree with 11.8 dB increase in the peak side lobe level when compared to the conventional delay and sum beamforming using a uniform planar array. Although there is an increase in the side lobe level, the asymmetric beam pattern of the proposed L array and the quadrant-based beamforming restrict the side lobes within a quadrant. The proposed method achieves a reduction in computation time by a factor of 97 for 3D imaging compared to the conventional method, while maintaining acceptable image quality. For qualitative analysis, the 3D images of different underwater targets have been reconstructed and compared in simulation and experiment.
A Performance Evaluation of Filtered Delay Multiply and Sum Beamforming for Ultrasound Localization Microscopy: Preliminary Results
Feb 27, 2024



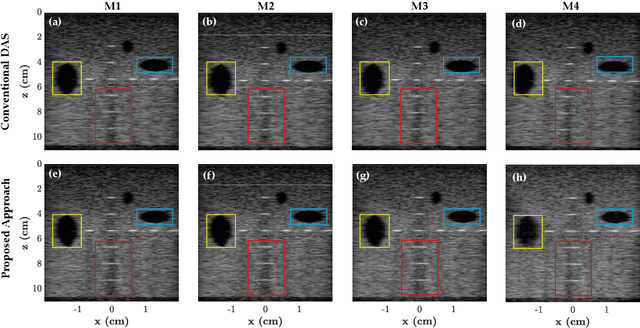
Ultrafast ultrasound localization microscopy (ULM), which has shown promising results in microvascular imaging, overcomes the typical trade-off between resolution and penetration depth. Combining ultrasound contrast agents and high frame rate imaging enables ULM to visualize microvasculature and quantify flow. However, the quality of the microvascular maps obtained depends on the signal-to-noise ratio of the received signals, image reconstruction techniques, and the microbubble (MB) localization and tracking algorithms used. Most reported research in ULM employs the conventional delay and sum (DAS) beamforming technique for image reconstruction despite its limited contrast and resolution. In this work, a filtered delay multiply and sum (F-DMAS) beamforming approach with non-steered plane wave transmit was employed for ULM, and its performance was compared with the conventional DAS-based approach for the different localization algorithms available in the Localization and Tracking Toolbox for Ultrasound Localization Microscopy. We also introduce two novel image quality measures that can overcome the limitations of conventional quality metrics that require suitable targets for evaluation. We also report the preliminary in-vitro investigation of F-DMAS with B-mode and power Doppler maps for microvascular imaging. The results are promising with enhanced contrast and lateral resolution, and suggest that further experimental studies are warranted.
Tiny-VBF: Resource-Efficient Vision Transformer based Lightweight Beamformer for Ultrasound Single-Angle Plane Wave Imaging
Nov 20, 2023Accelerating compute intensive non-real-time beam-forming algorithms in ultrasound imaging using deep learning architectures has been gaining momentum in the recent past. Nonetheless, the complexity of the state-of-the-art deep learning techniques poses challenges for deployment on resource-constrained edge devices. In this work, we propose a novel vision transformer based tiny beamformer (Tiny-VBF), which works on the raw radio-frequency channel data acquired through single-angle plane wave insonification. The output of our Tiny-VBF provides fast envelope detection requiring very low frame rate, i.e. 0.34 GOPs/Frame for a frame size of 368 x 128 in comparison to the state-of-the-art deep learning models. It also exhibited an 8% increase in contrast and gains of 5% and 33% in axial and lateral resolution respectively when compared to Tiny-CNN on in-vitro dataset. Additionally, our model showed a 4.2% increase in contrast and gains of 4% and 20% in axial and lateral resolution respectively when compared against conventional Delay-and-Sum (DAS) beamformer. We further propose an accelerator architecture and implement our Tiny-VBF model on a Zynq UltraScale+ MPSoC ZCU104 FPGA using a hybrid quantization scheme with 50% less resource consumption compared to the floating-point implementation, while preserving the image quality.
A Portable Ultrasound Imaging Pipeline Implementation with GPU Acceleration on Nvidia CLARA AGX
Oct 31, 2023In this paper, we present a GPU-accelerated prototype implementation of a portable ultrasound imaging pipeline on an Nvidia CLARA AGX development kit. The raw data is acquired with nonsteered plane wave transmit using a programmable handheld open platform that supports 128-channel transmit and 64-channel receive. The received signals are transferred to the Nvidia CLARA AGX developer platform through a host system for accelerated imaging. GPU-accelerated implementation of the conventional delay and sum (DAS) beamformer along with two adaptive nonlinear beamformers and two Fourier-based techniques was performed. The feasibility of the complete pipeline and its imaging performance was evaluated with in-vitro phantom imaging experiments and the efficacy is demonstrated with preliminary in-vivo scans. The image quality quantified by the standard contrast and resolution metrics was comparable with that of the CPU implementation. The execution speed of the implemented beamformers was also investigated for different sizes of imaging grids and a significant speedup as high as 180 times that of the CPU implementation was observed. Since the proposed pipeline involves Nvidia CLARA AGX, there is always the potential for easy incorporation of online/active learning approaches.
Towards Non-contact 3D Ultrasound for Wrist Imaging
Oct 06, 2023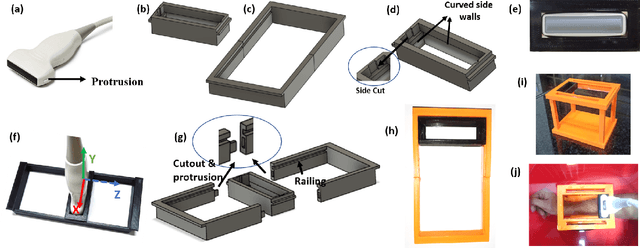

Objective: The objective of this work is an attempt towards non-contact freehand 3D ultrasound imaging with minimal complexity added to the existing point of care ultrasound (POCUS) systems. Methods: This study proposes a novel approach of using a mechanical track for non-contact ultrasound (US) scanning. The approach thus restricts the probe motion to a linear plane, to simplify the acquisition and 3D reconstruction process. A pipeline for US 3D volume reconstruction employing an US research platform and a GPU-based edge device is developed. Results: The efficacy of the proposed approach is demonstrated through ex-vivo and in-vivo experiments. Conclusion: The proposed approach with the adjustable field of view capability, non-contact design, and low cost of deployment without significantly altering the existing setup would open doors for up gradation of traditional systems to a wide range of 3D US imaging applications. Significance: Ultrasound (US) imaging is a popular clinical imaging modality for the point-of-care bedside imaging, particularly of the wrist/knee in the pediatric population due to its non-invasive and radiation free nature. However, the limited views of tissue structures obtained with 2D US in such scenarios make the diagnosis challenging. To overcome this, 3D US imaging which uses 2D US images and their orientation/position to reconstruct 3D volumes was developed. The accurate position estimation of the US probe at low cost has always stood as a challenging task in 3D reconstruction. Additionally, US imaging involves contact, which causes difficulty to pediatric subjects while monitoring live fractures or open wounds. Towards overcoming these challenges, a novel framework is attempted in this work.
Fast Marching based Tissue Adaptive Delay Estimation for Aberration Corrected Delay and Sum Beamforming in Ultrasound Imaging
Apr 19, 2023

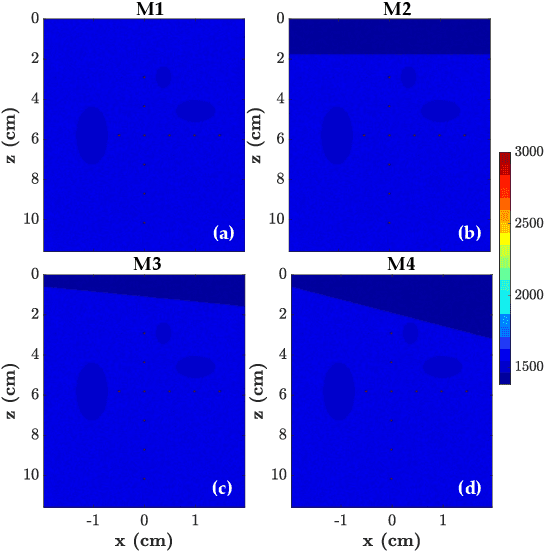
Conventional ultrasound (US) imaging employs the delay and sum (DAS) receive beamforming with dynamic receive focus for image reconstruction due to its simplicity and robustness. However, the DAS beamforming follows a geometrical method of delay estimation with a spatially constant speed-of-sound (SoS) of 1540 m/s throughout the medium irrespective of the tissue in-homogeneity. This approximation leads to errors in delay estimations that accumulate with depth and degrades the resolution, contrast and overall accuracy of the US image. In this work, we propose a fast marching based DAS for focused transmissions which leverages the approximate SoS map to estimate the refraction corrected propagation delays for each pixel in the medium. The proposed approach is validated qualitatively and quantitatively for imaging depths of upto ~ 11 cm through simulations, where fat layer induced aberration is employed to alter the SoS in the medium. To the best of authors' knowledge, this is the first work considering the effect of SoS on image quality for deeper imaging.
On The Application Of Log Compression and Enhanced Denoising In Contrast Enhancement Of Digital Radiography Images
Apr 18, 2023

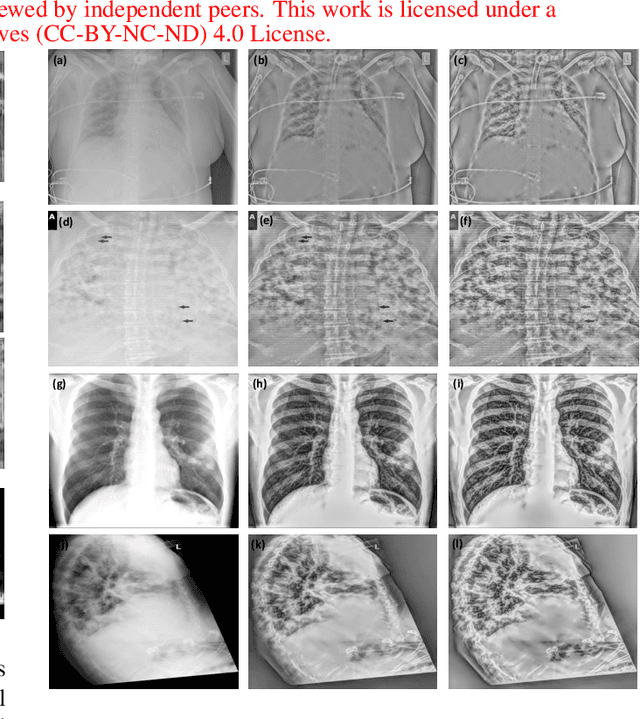

Digital radiography (DR) is becoming popular for the point of care imaging in the recent past. To reduce the radiation exposure, controlled radiation based on as low as reasonably achievable (ALARA) principle is employed and this results in low contrast images. To address this issue, post-processing algorithms such as the Multiscale Image Contrast Amplification (MUSICA) algorithm can be used to enhance the contrast of DR images even with a low radiation dose. In this study, a modification of the MUSICA algorithm is investigated to determine the potential for further contrast improvement specifically for DR images. The conclusion is that combining log compression and its inverse at the appropriate stage with a multi-stage MUSICA and denoising is very promising. The proposed method resulted in an average of 66.5 % increase in the mean contrast-to-noise ratio (CNR) for the test images considered.
A Simplified 3D Ultrasound Freehand Imaging Framework Using 1D Linear Probe and Low-Cost Mechanical Track
Feb 16, 2023Ultrasound imaging is the most popular medical imaging modality for point-of-care bedside imaging. However, 2D ultrasound imaging provides only limited views of the organ of interest, making diagnosis challenging. To overcome this, 3D ultrasound imaging was developed, which uses 2D ultrasound images and their orientation/position to reconstruct 3D volumes. The accurate position estimation of the ultrasound probe at low cost has always stood as a challenging task in 3D reconstruction. In this study, we propose a novel approach of using a mechanical track for ultrasound scanning, which restricts the probe motion to a linear plane, simplifying the acquisition and hence the reconstruction process. We also present an end-to-end pipeline for 3D ultrasound volume reconstruction and demonstrate its efficacy with an in-vitro tube phantom study and an ex-vivo bone experiment. The comparison between a sensorless freehand and the proposed mechanical track based acquisition is available online (shorturl.at/jqvX0).
Ultrasound Based Prosthetic Arm Control
Feb 10, 2023The creation of unique control methods for a hand prosthesis is still a problem that has to be addressed. The best choice of a human-machine interface (HMI) that should be used to enable natural control is still a challenge. Surface electromyography (sEMG), the most popular option, has a variety of difficult-to-fix issues (electrode displacement, sweat, fatigue). The ultrasound imaging-based methodology offers a means of recognising complex muscle activity and configuration with a greater SNR and less hardware requirements as compared to sEMG. In this study, a prototype system for high frame rate ultrasound imaging for prosthetic arm control is proposed. Using the proposed framework, a virtual robotic hand simulation is developed that can mimick a human hand as illustrated in the link. The proposed classification model simulating four hand gestures has a classification accuracy of more than 90%.
Gas Leak detection using airborne US Sensors
Feb 08, 2023



Gas leakage is a critical problem in the industrial sector, residential structures, and gas-powered vehicles; installing gas leakage detection systems is one of the preventative strategies for reducing hazards caused by gas leakage. Conventional gas sensors, such as electrochemical, infrared point, and MOS sensors, have traditionally been used to detect leaks. The challenge with these sensors is their versatility in settings involving many gases, as well as their exorbitant cost and scalability. As a result, several gas detection approaches were explored. Our approach utilizes 40 KHz ultrasound signal for gas detection. Here, the reflected signal has been analyzed to detect gas leaks and identify gas in real-time, providing a quick, reliable solution for gas leak detection in industrial environments. The electronics and sensors used are both low-cost and easily scalable. The system incorporates commonly accessible materials and off-the-shelf components, making it suitable for use in a variety of contexts. They are also more effective at detecting numerous gas leaks and has a longer lifetime. Butane was used to test our system. The breaches were identified in 0.01 seconds after permitting gas to flow from a broken pipe, whereas identifying the gas took 0.8 seconds