 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Prototyping Framework for Distributed Control of Multi-Robot Systems
May 14, 2026This paper presents a prototyping framework for distributed control of multi-robot systems, aimed at bridging theory and practical testing of distributed optimization algorithms. Using the Single Program, Multiple Data (SPMD) paradigm, the framework emulates distributed control on a single computer, with each core running the same algorithm using local states and neighbour-to-neighbour communication. We demonstrate the framework on a four-quadrotor position-swapping task using a non-cooperative game-theoretic distributed algorithm. Computational time and trajectory data are compared across the supported dynamics levels: a point-mass model, a high-fidelity quadrotor model, and an experimental hardware testbed using Crazyflie quadcopters. The results show that the framework provides a low-cost and accessible approach for validating distributed algorithms.
Constrained Diffusers for Safe Planning and Control
Jun 14, 2025



Diffusion models have shown remarkable potential in planning and control tasks due to their ability to represent multimodal distributions over actions and trajectories. However, ensuring safety under constraints remains a critical challenge for diffusion models. This paper proposes Constrained Diffusers, a novel framework that incorporates constraints into pre-trained diffusion models without retraining or architectural modifications. Inspired by constrained optimization, we apply a constrained Langevin sampling mechanism for the reverse diffusion process that jointly optimizes the trajectory and realizes constraint satisfaction through three iterative algorithms: projected method, primal-dual method and augmented Lagrangian approaches. In addition, we incorporate discrete control barrier functions as constraints for constrained diffusers to guarantee safety in online implementation. Experiments in Maze2D, locomotion, and pybullet ball running tasks demonstrate that our proposed methods achieve constraint satisfaction with less computation time, and are competitive to existing methods in environments with static and time-varying constraints.
NLBAC: A Neural Ordinary Differential Equations-based Framework for Stable and Safe Reinforcement Learning
Jan 23, 2024Reinforcement learning (RL) excels in applications such as video games and robotics, but ensuring safety and stability remains challenging when using RL to control real-world systems where using model-free algorithms suffering from low sample efficiency might be prohibitive. This paper first provides safety and stability definitions for the RL system, and then introduces a Neural ordinary differential equations-based Lyapunov-Barrier Actor-Critic (NLBAC) framework that leverages Neural Ordinary Differential Equations (NODEs) to approximate system dynamics and integrates the Control Barrier Function (CBF) and Control Lyapunov Function (CLF) frameworks with the actor-critic method to assist in maintaining the safety and stability for the system. Within this framework, we employ the augmented Lagrangian method to update the RL-based controller parameters. Additionally, we introduce an extra backup controller in situations where CBF constraints for safety and the CLF constraint for stability cannot be satisfied simultaneously. Simulation results demonstrate that the framework leads the system to approach the desired state and allows fewer violations of safety constraints with better sample efficiency compared to other methods.
Rational Neural Network Controllers
Jul 12, 2023Neural networks have shown great success in many machine learning related tasks, due to their ability to act as general function approximators. Recent work has demonstrated the effectiveness of neural networks in control systems (known as neural feedback loops), most notably by using a neural network as a controller. However, one of the big challenges of this approach is that neural networks have been shown to be sensitive to adversarial attacks. This means that, unless they are designed properly, they are not an ideal candidate for controllers due to issues with robustness and uncertainty, which are pivotal aspects of control systems. There has been initial work on robustness to both analyse and design dynamical systems with neural network controllers. However, one prominent issue with these methods is that they use existing neural network architectures tailored for traditional machine learning tasks. These structures may not be appropriate for neural network controllers and it is important to consider alternative architectures. This paper considers rational neural networks and presents novel rational activation functions, which can be used effectively in robustness problems for neural feedback loops. Rational activation functions are replaced by a general rational neural network structure, which is convex in the neural network's parameters. A method is proposed to recover a stabilising controller from a Sum of Squares feasibility test. This approach is then applied to a refined rational neural network which is more compatible with Sum of Squares programming. Numerical examples show that this method can successfully recover stabilising rational neural network controllers for neural feedback loops with non-linear plants with noise and parametric uncertainty.
A Barrier-Lyapunov Actor-Critic Reinforcement Learning Approach for Safe and Stable Control
Apr 08, 2023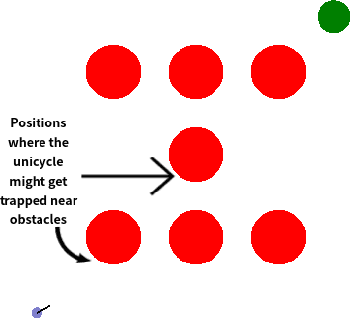
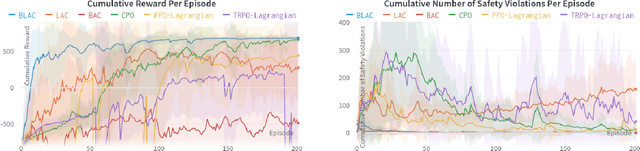
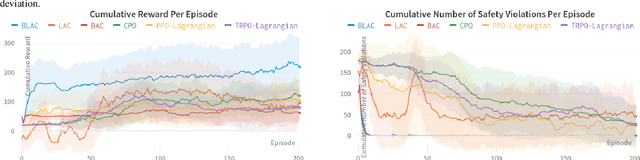
Reinforcement learning (RL) has demonstrated impressive performance in various areas such as video games and robotics. However, ensuring safety and stability, which are two critical properties from a control perspective, remains a significant challenge when using RL to control real-world systems. In this paper, we first provide definitions of safety and stability for the RL system, and then combine the control barrier function (CBF) and control Lyapunov function (CLF) methods with the actor-critic method in RL to propose a Barrier-Lyapunov Actor-Critic (BLAC) framework which helps maintain the aforementioned safety and stability for the system. In this framework, CBF constraints for safety and CLF constraint for stability are constructed based on the data sampled from the replay buffer, and the augmented Lagrangian method is used to update the parameters of the RL-based controller. Furthermore, an additional backup controller is introduced in case the RL-based controller cannot provide valid control signals when safety and stability constraints cannot be satisfied simultaneously. Simulation results show that this framework yields a controller that can help the system approach the desired state and cause fewer violations of safety constraints compared to baseline algorithms.
Stochastic processes and feedback-linearisation for online identification and Bayesian adaptive control of fully-actuated mechanical systems
Apr 01, 2014
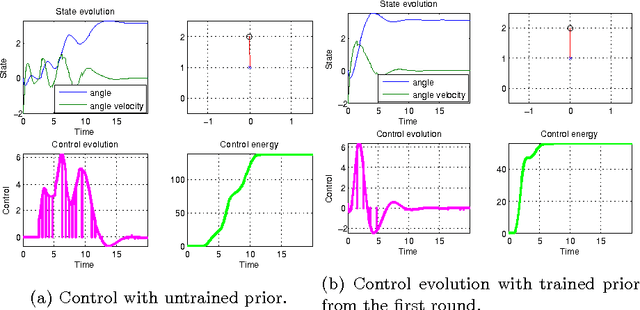

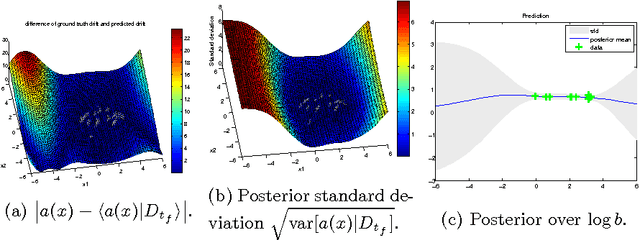
This work proposes a new method for simultaneous probabilistic identification and control of an observable, fully-actuated mechanical system. Identification is achieved by conditioning stochastic process priors on observations of configurations and noisy estimates of configuration derivatives. In contrast to previous work that has used stochastic processes for identification, we leverage the structural knowledge afforded by Lagrangian mechanics and learn the drift and control input matrix functions of the control-affine system separately. We utilise feedback-linearisation to reduce, in expectation, the uncertain nonlinear control problem to one that is easy to regulate in a desired manner. Thereby, our method combines the flexibility of nonparametric Bayesian learning with epistemological guarantees on the expected closed-loop trajectory. We illustrate our method in the context of torque-actuated pendula where the dynamics are learned with a combination of normal and log-normal processes.