 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoScaler: Geometry and Rendering-Aware Downsampling of 3D Mesh Textures
Nov 28, 2023High-resolution texture maps are necessary for representing real-world objects accurately with 3D meshes. The large sizes of textures can bottleneck the real-time rendering of high-quality virtual 3D scenes on devices having low computational budgets and limited memory. Downsampling the texture maps directly addresses the issue, albeit at the cost of visual fidelity. Traditionally, downsampling of texture maps is performed using methods like bicubic interpolation and the Lanczos algorithm. These methods ignore the geometric layout of the mesh and its UV parametrization and also do not account for the rendering process used to obtain the final visualization that the users will experience. Towards filling these gaps, we introduce GeoScaler, which is a method of downsampling texture maps of 3D meshes while incorporating geometric cues, and by maximizing the visual fidelity of the rendered views of the textured meshes. We show that the textures generated by GeoScaler deliver significantly better quality rendered images compared to those generated by traditional downsampling methods
TabPert: An Effective Platform for Tabular Perturbation
Aug 02, 2021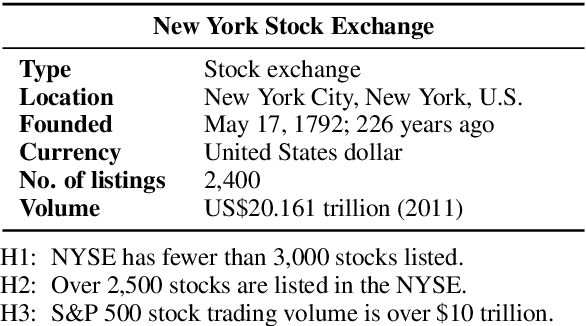
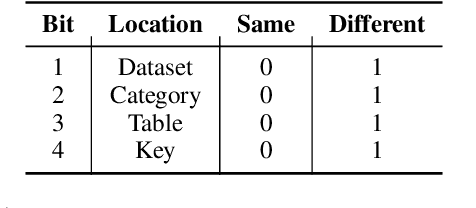
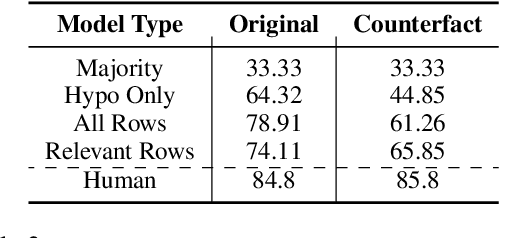
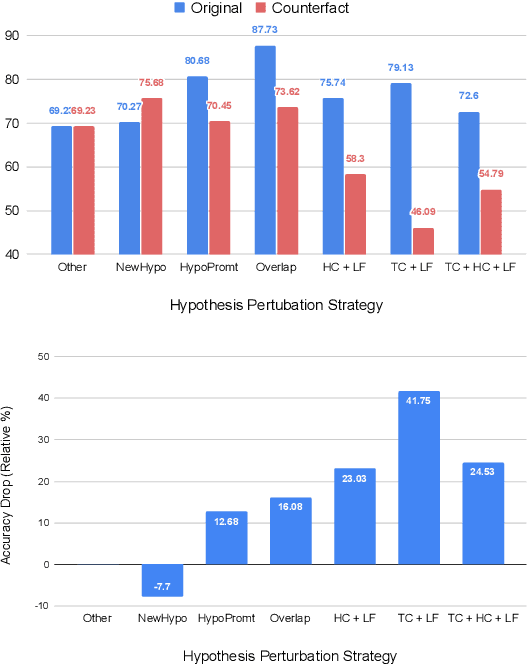
To truly grasp reasoning ability, a Natural Language Inference model should be evaluated on counterfactual data. TabPert facilitates this by assisting in the generation of such counterfactual data for assessing model tabular reasoning issues. TabPert allows a user to update a table, change its associated hypotheses, change their labels, and highlight rows that are important for hypothesis classification. TabPert also captures information about the techniques used to automatically produce the table, as well as the strategies employed to generate the challenging hypotheses. These counterfactual tables and hypotheses, as well as the metadata, can then be used to explore an existing model's shortcomings methodically and quantitatively.
Active Adversarial Evader Tracking with a Probabilistic Pursuer under the Pursuit-Evasion Game Framework
Apr 19, 2019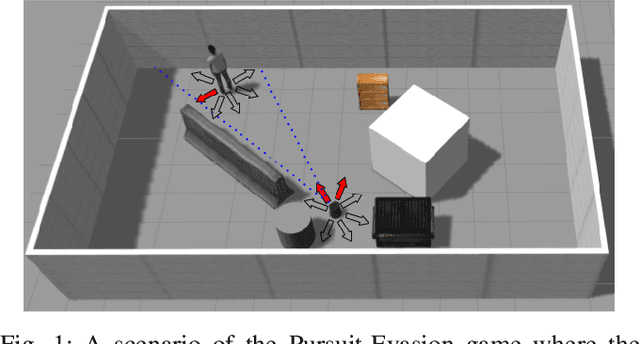
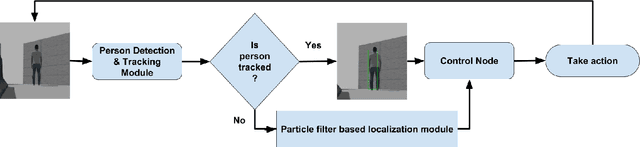

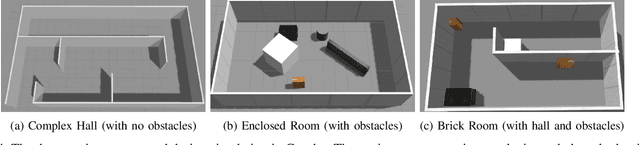
Given a mapped environment, we formulate the problem of visually tracking and following an evader using a probabilistic framework. In this work, we consider a non-holonomic robot with a limited visibility depth sensor in an indoor environment with obstacles. The mobile robot that follows the target is considered a pursuer and the agent being followed is considered an evader. We propose a probabilistic framework for both the pursuer and evader to achieve their conflicting goals. We introduce a smart evader that has information about the location of the pursuer. The goal of this variant of the evader is to avoid being tracked by the pursuer by using the visibility region information obtained from the pursuer, to further challenge the proposed smart pursuer. To validate the efficiency of the framework, we conduct several experiments in simulation by using Gazebo and evaluate the success rate of tracking an evader in various environments with different pursuer to evader speed ratios. Through our experiments we validate our hypothesis that a smart pursuer tracks an evader more effectively than a pursuer that just navigates in the environment randomly. We also validate that an evader that is aware of the actions of the pursuer is more successful at avoiding getting tracked by a smart pursuer than a random evader. Finally, we empirically show that while a smart pursuer does increase it's average success rate of tracking compared to a random pursuer, there is an increased variance in its success rate distribution when the evader becomes aware of its actions.