 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Adversarial Evader Tracking with a Probabilistic Pursuer under the Pursuit-Evasion Game Framework
Paper and Code
Apr 19, 2019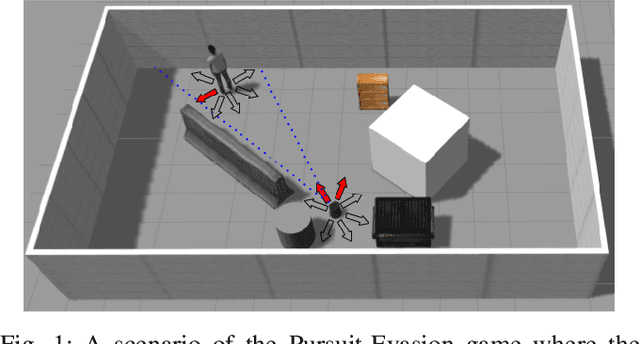

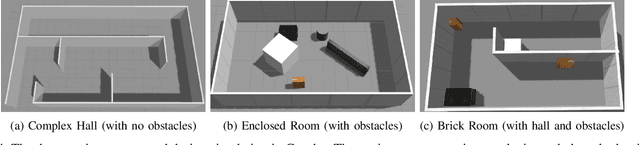
Given a mapped environment, we formulate the problem of visually tracking and following an evader using a probabilistic framework. In this work, we consider a non-holonomic robot with a limited visibility depth sensor in an indoor environment with obstacles. The mobile robot that follows the target is considered a pursuer and the agent being followed is considered an evader. We propose a probabilistic framework for both the pursuer and evader to achieve their conflicting goals. We introduce a smart evader that has information about the location of the pursuer. The goal of this variant of the evader is to avoid being tracked by the pursuer by using the visibility region information obtained from the pursuer, to further challenge the proposed smart pursuer. To validate the efficiency of the framework, we conduct several experiments in simulation by using Gazebo and evaluate the success rate of tracking an evader in various environments with different pursuer to evader speed ratios. Through our experiments we validate our hypothesis that a smart pursuer tracks an evader more effectively than a pursuer that just navigates in the environment randomly. We also validate that an evader that is aware of the actions of the pursuer is more successful at avoiding getting tracked by a smart pursuer than a random evader. Finally, we empirically show that while a smart pursuer does increase it's average success rate of tracking compared to a random pursuer, there is an increased variance in its success rate distribution when the evader becomes aware of its actions.