 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunicative Capital for Prosthetic Agents
Nov 10, 2017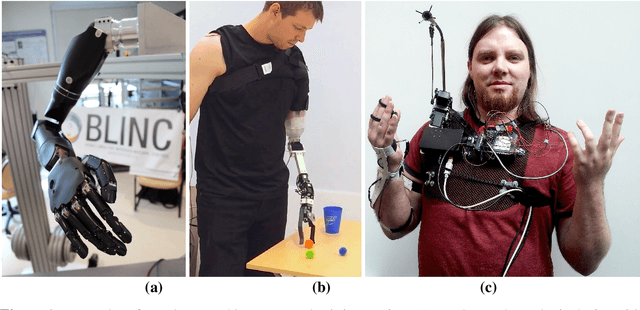
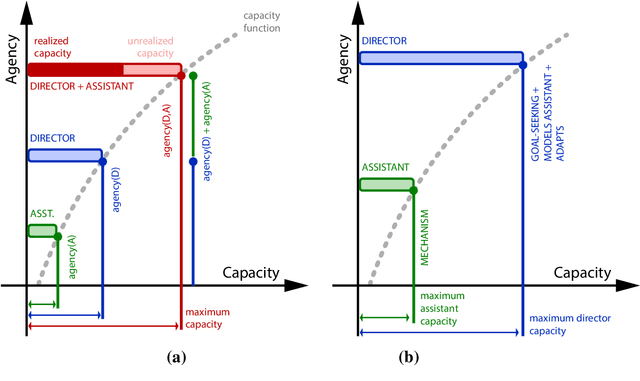

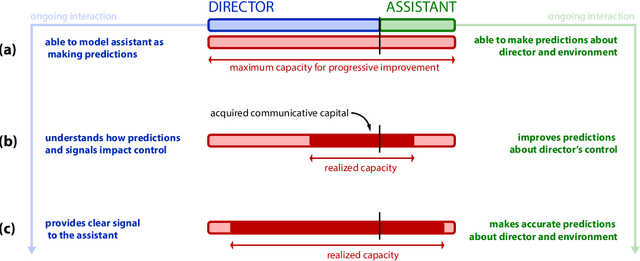
This work presents an overarching perspective on the role that machine intelligence can play in enhancing human abilities, especially those that have been diminished due to injury or illness. As a primary contribution, we develop the hypothesis that assistive devices, and specifically artificial arms and hands, can and should be viewed as agents in order for us to most effectively improve their collaboration with their human users. We believe that increased agency will enable more powerful interactions between human users and next generation prosthetic devices, especially when the sensorimotor space of the prosthetic technology greatly exceeds the conventional control and communication channels available to a prosthetic user. To more concretely examine an agency-based view on prosthetic devices, we propose a new schema for interpreting the capacity of a human-machine collaboration as a function of both the human's and machine's degrees of agency. We then introduce the idea of communicative capital as a way of thinking about the communication resources developed by a human and a machine during their ongoing interaction. Using this schema of agency and capacity, we examine the benefits and disadvantages of increasing the agency of a prosthetic limb. To do so, we present an analysis of examples from the literature where building communicative capital has enabled a progression of fruitful, task-directed interactions between prostheses and their human users. We then describe further work that is needed to concretely evaluate the hypothesis that prostheses are best thought of as agents. The agent-based viewpoint developed in this article significantly extends current thinking on how best to support the natural, functional use of increasingly complex prosthetic enhancements, and opens the door for more powerful interactions between humans and their assistive technologies.
Using Learned Predictions as Feedback to Improve Control and Communication with an Artificial Limb: Preliminary Findings
Aug 08, 2014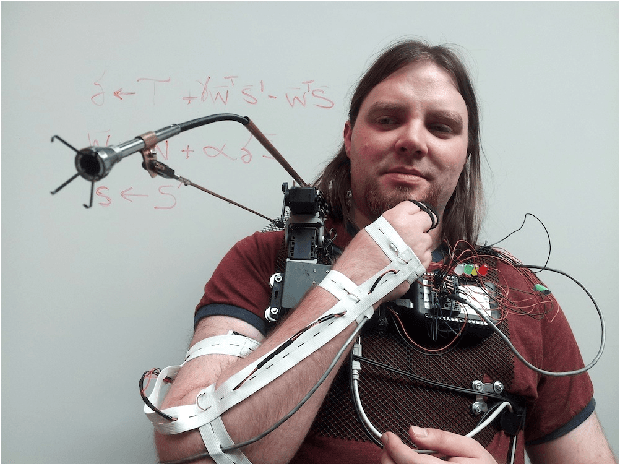
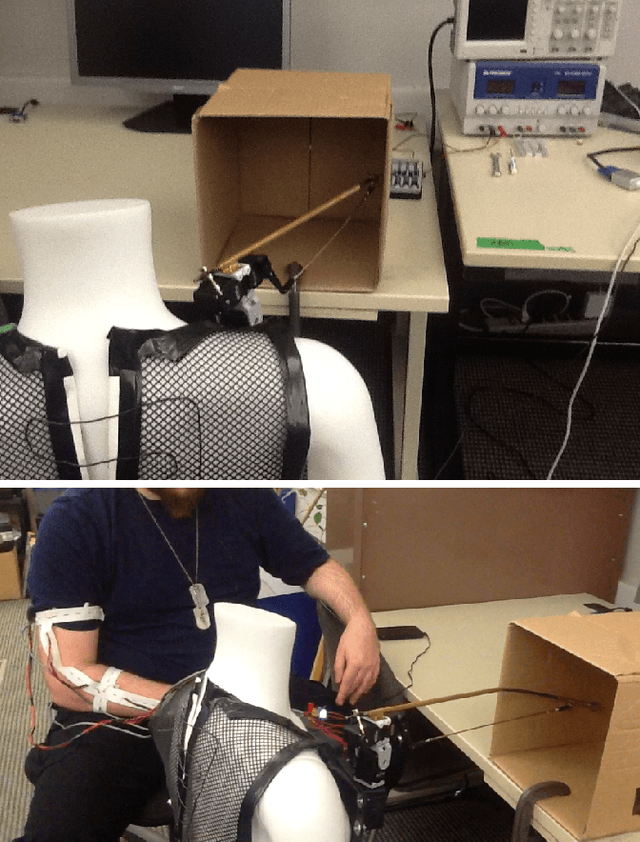
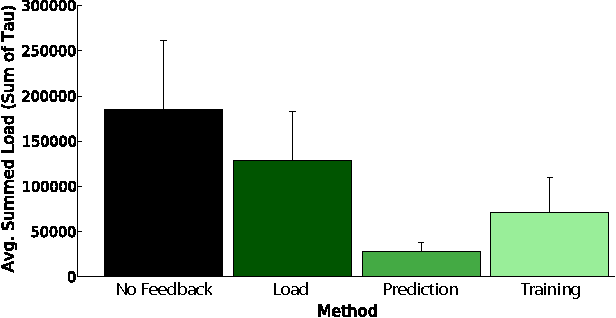
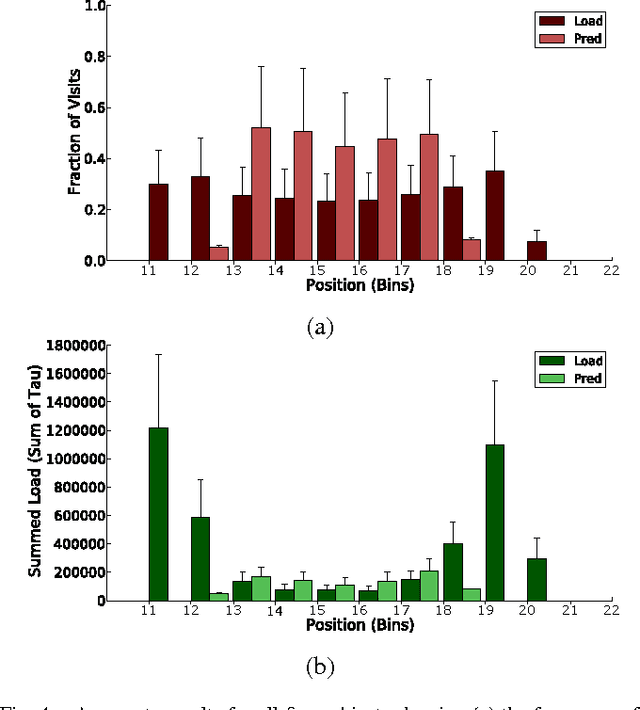
Many people suffer from the loss of a limb. Learning to get by without an arm or hand can be very challenging, and existing prostheses do not yet fulfil the needs of individuals with amputations. One promising solution is to provide greater communication between a prosthesis and its user. Towards this end, we present a simple machine learning interface to supplement the control of a robotic limb with feedback to the user about what the limb will be experiencing in the near future. A real-time prediction learner was implemented to predict impact-related electrical load experienced by a robot limb; the learning system's predictions were then communicated to the device's user to aid in their interactions with a workspace. We tested this system with five able-bodied subjects. Each subject manipulated the robot arm while receiving different forms of vibrotactile feedback regarding the arm's contact with its workspace. Our trials showed that communicable predictions could be learned quickly during human control of the robot arm. Using these predictions as a basis for feedback led to a statistically significant improvement in task performance when compared to purely reactive feedback from the device. Our study therefore contributes initial evidence that prediction learning and machine intelligence can benefit not just control, but also feedback from an artificial limb. We expect that a greater level of acceptance and ownership can be achieved if the prosthesis itself takes an active role in transmitting learned knowledge about its state and its situation of use.
Temporal-Difference Learning to Assist Human Decision Making during the Control of an Artificial Limb
Sep 18, 2013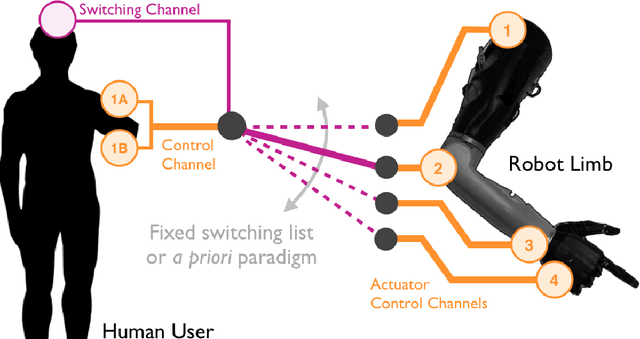


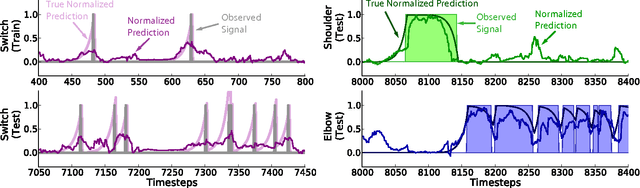
In this work we explore the use of reinforcement learning (RL) to help with human decision making, combining state-of-the-art RL algorithms with an application to prosthetics. Managing human-machine interaction is a problem of considerable scope, and the simplification of human-robot interfaces is especially important in the domains of biomedical technology and rehabilitation medicine. For example, amputees who control artificial limbs are often required to quickly switch between a number of control actions or modes of operation in order to operate their devices. We suggest that by learning to anticipate (predict) a user's behaviour, artificial limbs could take on an active role in a human's control decisions so as to reduce the burden on their users. Recently, we showed that RL in the form of general value functions (GVFs) could be used to accurately detect a user's control intent prior to their explicit control choices. In the present work, we explore the use of temporal-difference learning and GVFs to predict when users will switch their control influence between the different motor functions of a robot arm. Experiments were performed using a multi-function robot arm that was controlled by muscle signals from a user's body (similar to conventional artificial limb control). Our approach was able to acquire and maintain forecasts about a user's switching decisions in real time. It also provides an intuitive and reward-free way for users to correct or reinforce the decisions made by the machine learning system. We expect that when a system is certain enough about its predictions, it can begin to take over switching decisions from the user to streamline control and potentially decrease the time and effort needed to complete tasks. This preliminary study therefore suggests a way to naturally integrate human- and machine-based decision making systems.