 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal-Difference Learning to Assist Human Decision Making during the Control of an Artificial Limb
Paper and Code
Sep 18, 2013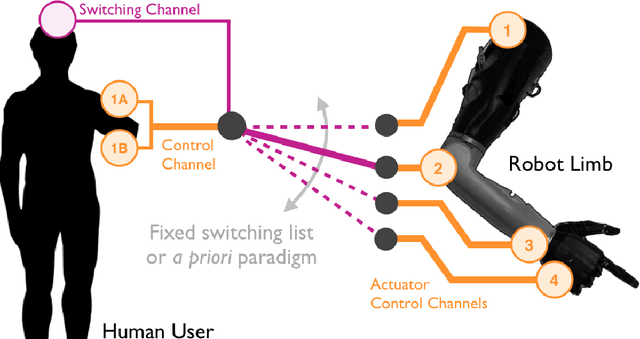


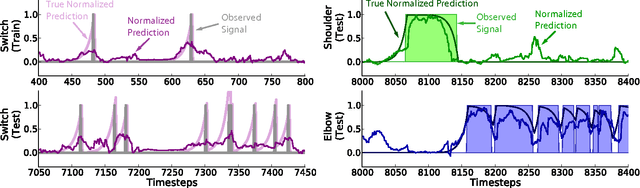
In this work we explore the use of reinforcement learning (RL) to help with human decision making, combining state-of-the-art RL algorithms with an application to prosthetics. Managing human-machine interaction is a problem of considerable scope, and the simplification of human-robot interfaces is especially important in the domains of biomedical technology and rehabilitation medicine. For example, amputees who control artificial limbs are often required to quickly switch between a number of control actions or modes of operation in order to operate their devices. We suggest that by learning to anticipate (predict) a user's behaviour, artificial limbs could take on an active role in a human's control decisions so as to reduce the burden on their users. Recently, we showed that RL in the form of general value functions (GVFs) could be used to accurately detect a user's control intent prior to their explicit control choices. In the present work, we explore the use of temporal-difference learning and GVFs to predict when users will switch their control influence between the different motor functions of a robot arm. Experiments were performed using a multi-function robot arm that was controlled by muscle signals from a user's body (similar to conventional artificial limb control). Our approach was able to acquire and maintain forecasts about a user's switching decisions in real time. It also provides an intuitive and reward-free way for users to correct or reinforce the decisions made by the machine learning system. We expect that when a system is certain enough about its predictions, it can begin to take over switching decisions from the user to streamline control and potentially decrease the time and effort needed to complete tasks. This preliminary study therefore suggests a way to naturally integrate human- and machine-based decision making systems.