 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Design and Control of a Robotic Arm on a Quadcopter for Enhanced Package Delivery
Oct 20, 2024



This paper presents a comprehensive design process for the integration of a robotic arm into a quadcopter, emphasizing the physical modeling, system integration, and controller development. Utilizing SolidWorks for mechanical design and MATLAB Simscape for simulation and control, this study addresses the challenges encountered in integrating the robotic arm with the drone, encompassing both mechanical and control aspects. Two types of controllers are developed and analyzed: a Proportional-Integral-Derivative (PID) controller and a Model Reference Adaptive Controller (MRAC). The design and tuning of these controllers are key components of this research, with the focus on their application in package delivery tasks. Extensive simulations demonstrate the performance of each controller, with PID controllers exhibiting superior trajectory tracking and lower Root Mean Square (RMS) errors under various payload conditions. The results underscore the efficacy of PID control for stable flight and precise maneuvering, while highlighting adaptability of MRAC to changing dynamics.
Serverless inferencing on Kubernetes
Jul 24, 2020
Organisations are increasingly putting machine learning models into production at scale. The increasing popularity of serverless scale-to-zero paradigms presents an opportunity for deploying machine learning models to help mitigate infrastructure costs when many models may not be in continuous use. We will discuss the KFServing project which builds on the KNative serverless paradigm to provide a serverless machine learning inference solution that allows a consistent and simple interface for data scientists to deploy their models. We will show how it solves the challenges of autoscaling GPU based inference and discuss some of the lessons learnt from using it in production.
A Skip-connected Multi-column Network for Isolated Handwritten Bangla Character and Digit recognition
Apr 27, 2020

Finding local invariant patterns in handwrit-ten characters and/or digits for optical character recognition is a difficult task. Variations in writing styles from one person to another make this task challenging. We have proposed a non-explicit feature extraction method using a multi-scale multi-column skip convolutional neural network in this work. Local and global features extracted from different layers of the proposed architecture are combined to derive the final feature descriptor encoding a character or digit image. Our method is evaluated on four publicly available datasets of isolated handwritten Bangla characters and digits. Exhaustive comparative analysis against contemporary methods establishes the efficacy of our proposed approach.
A Genetic Algorithm based Kernel-size Selection Approach for a Multi-column Convolutional Neural Network
Dec 28, 2019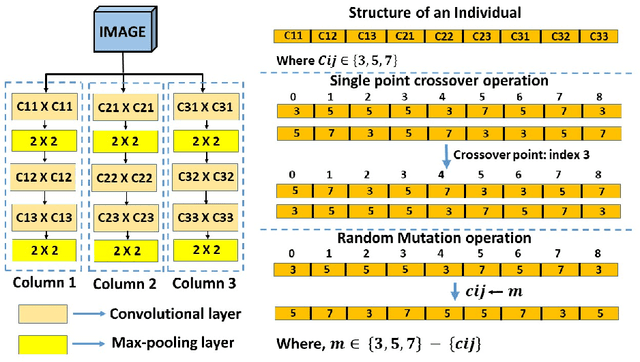
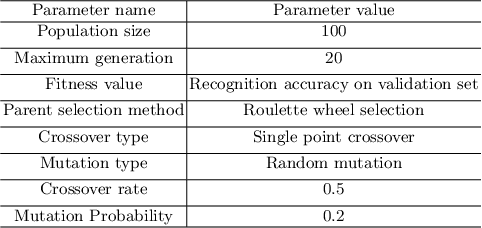
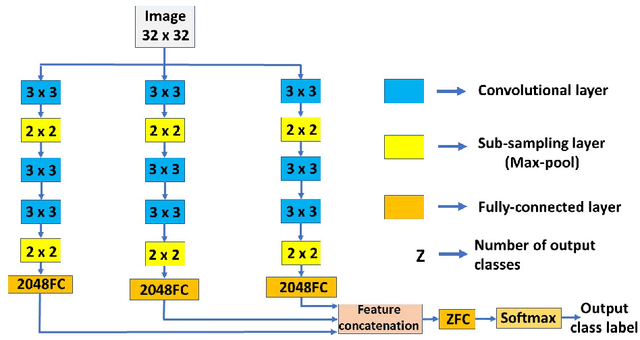
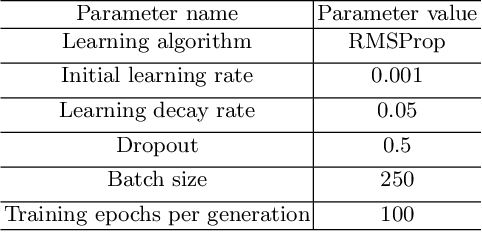
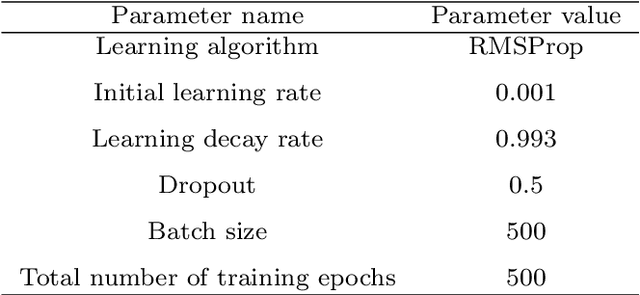
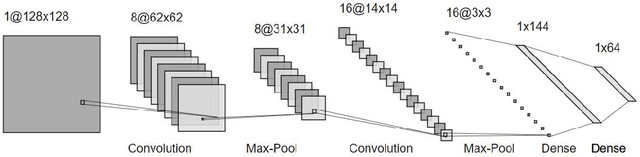
Deep neural network-based architectures give promising results in various domains including \textit{pattern recognition}. Finding the optimal combination of the hyper-parameters of such a large-sized architecture is tedious and requires a large number of laboratory experiments. But, identifying the optimal combination of a hyper-parameter or appropriate kernel size for a given architecture of deep learning is always a challenging and tedious task. Here, we introduced a genetic algorithm-based technique to reduce the efforts of finding the optimal combination of a hyper-parameter (kernel size) of a convolutional neural network-based architecture. The method is evaluated on three popular datasets of different handwritten Bangla characters and digits.