 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCook2LTL: Translating Cooking Recipes to LTL Formulae using Large Language Models
Sep 29, 2023



Cooking recipes are especially challenging to translate to robot plans as they feature rich linguistic complexity, temporally-extended interconnected tasks, and an almost infinite space of possible actions. Our key insight is that combining a source of background cooking domain knowledge with a formalism capable of handling the temporal richness of cooking recipes could enable the extraction of unambiguous, robot-executable plans. In this work, we use Linear Temporal Logic (LTL) as a formal language expressible enough to model the temporal nature of cooking recipes. Leveraging pre-trained Large Language Models (LLMs), we present a system that translates instruction steps from an arbitrary cooking recipe found on the internet to a series of LTL formulae, grounding high-level cooking actions to a set of primitive actions that are executable by a manipulator in a kitchen environment. Our approach makes use of a caching scheme, dynamically building a queryable action library at runtime, significantly decreasing LLM API calls (-51%), latency (-59%) and cost (-42%) compared to a baseline that queries the LLM for every newly encountered action at runtime. We demonstrate the transferability of our system in a realistic simulation platform through showcasing a set of simple cooking tasks.
B-GAP: Behavior-Guided Action Prediction for Autonomous Navigation
Nov 07, 2020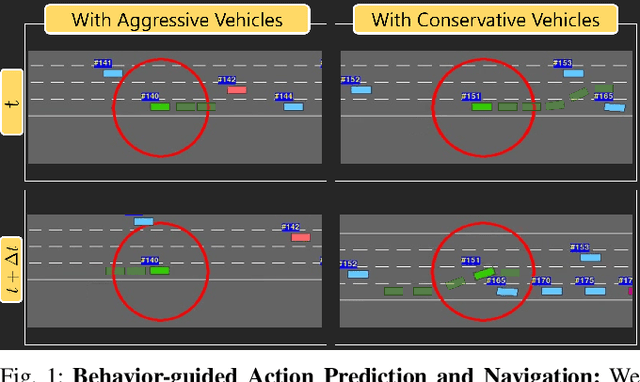



We present a novel learning algorithm for action prediction and local navigation for autonomous driving. Our approach classifies the driver behavior of other vehicles or road-agents (aggressive or conservative) and takes that into account for decision making and safe driving. We present a behavior-driven simulator that can generate trajectories corresponding to different levels of aggressive behaviors and use our simulator to train a policy using graph convolutional networks. We use a reinforcement learning-based navigation scheme that uses a proximity graph of traffic agents and computes a safe trajectory for the ego-vehicle that accounts for aggressive driver maneuvers such as overtaking, over-speeding, weaving, and sudden lane changes. We have integrated our algorithm with OpenAI gym-based "Highway-Env" simulator and demonstrate the benefits in terms of improved navigation in different scenarios.