 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeB-GAP: Behavior-Guided Action Prediction for Autonomous Navigation
Paper and Code
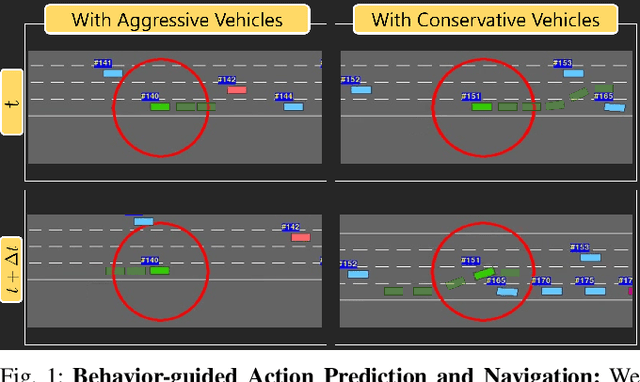



We present a novel learning algorithm for action prediction and local navigation for autonomous driving. Our approach classifies the driver behavior of other vehicles or road-agents (aggressive or conservative) and takes that into account for decision making and safe driving. We present a behavior-driven simulator that can generate trajectories corresponding to different levels of aggressive behaviors and use our simulator to train a policy using graph convolutional networks. We use a reinforcement learning-based navigation scheme that uses a proximity graph of traffic agents and computes a safe trajectory for the ego-vehicle that accounts for aggressive driver maneuvers such as overtaking, over-speeding, weaving, and sudden lane changes. We have integrated our algorithm with OpenAI gym-based "Highway-Env" simulator and demonstrate the benefits in terms of improved navigation in different scenarios.