 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Interaction Data to Predict Engagement with Interactive Media
Aug 04, 2021
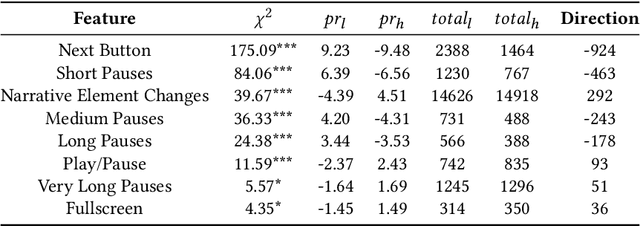
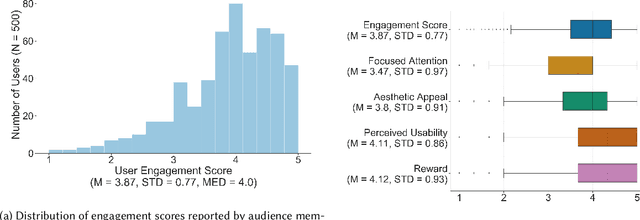
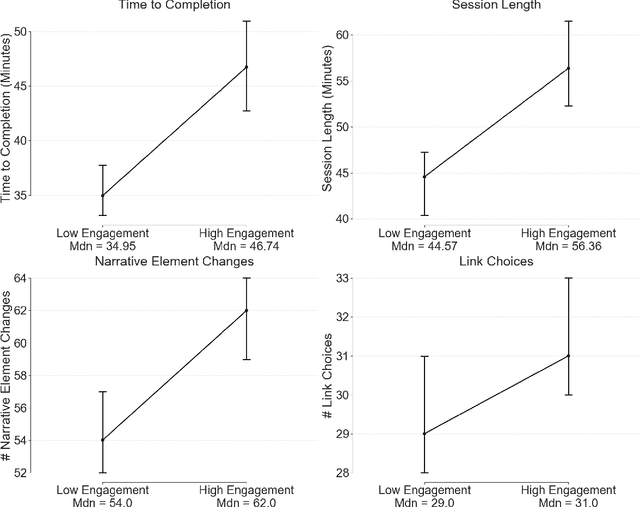
Media is evolving from traditional linear narratives to personalised experiences, where control over information (or how it is presented) is given to individual audience members. Measuring and understanding audience engagement with this media is important in at least two ways: (1) a post-hoc understanding of how engaged audiences are with the content will help production teams learn from experience and improve future productions; (2), this type of media has potential for real-time measures of engagement to be used to enhance the user experience by adapting content on-the-fly. Engagement is typically measured by asking samples of users to self-report, which is time consuming and expensive. In some domains, however, interaction data have been used to infer engagement. Fortuitously, the nature of interactive media facilitates a much richer set of interaction data than traditional media; our research aims to understand if these data can be used to infer audience engagement. In this paper, we report a study using data captured from audience interactions with an interactive TV show to model and predict engagement. We find that temporal metrics, including overall time spent on the experience and the interval between events, are predictive of engagement. The results demonstrate that interaction data can be used to infer users' engagement during and after an experience, and the proposed techniques are relevant to better understand audience preference and responses.
Estimation for Quadrotors
Aug 31, 2018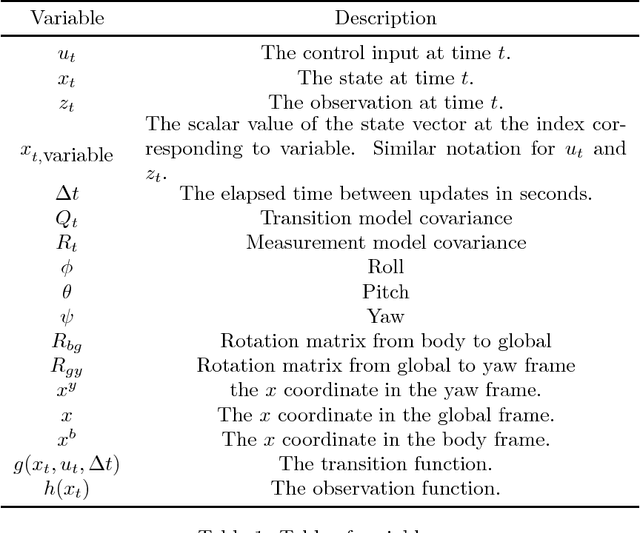
This document describes standard approaches for filtering and estimation for quadrotors, created for the Udacity Flying Cars course. We assume previous knowledge of probability and some knowledge of linear algebra. We do not assume previous knowledge of Kalman filters or Bayes filters. This document derives an EKF for various models of drones in 1D, 2D, and 3D. We use the EKF and notation as defined in Thrun et al. [13]. We also give pseudocode for the Bayes filter, the EKF, and the Unscented Kalman filter [14]. The motivation behind this document is the lack of a step-by-step EKF tutorial that provides the derivations for a quadrotor helicopter. The goal of estimation is to infer the drone's state (pose, velocity, acceleration, and biases) from its sensor values and control inputs. This problem is challenging because sensors are noisy. Additionally, because of weight and cost issues, many drones have limited on-board computation so we want to estimate these values as quickly as possible. The standard method for performing this method is the Extended Kalman filter, a nonlinear extension of the Kalman filter which linearizes a nonlinear transition and measurement model around the current state. However the Unscented Kalman filter is better in almost every respect: simpler to implement, more accurate to estimate, and comparable runtimes.
Recurrent Neural Network Attention Mechanisms for Interpretable System Log Anomaly Detection
Mar 13, 2018



Deep learning has recently demonstrated state-of-the art performance on key tasks related to the maintenance of computer systems, such as intrusion detection, denial of service attack detection, hardware and software system failures, and malware detection. In these contexts, model interpretability is vital for administrator and analyst to trust and act on the automated analysis of machine learning models. Deep learning methods have been criticized as black box oracles which allow limited insight into decision factors. In this work we seek to "bridge the gap" between the impressive performance of deep learning models and the need for interpretable model introspection. To this end we present recurrent neural network (RNN) language models augmented with attention for anomaly detection in system logs. Our methods are generally applicable to any computer system and logging source. By incorporating attention variants into our RNN language models we create opportunities for model introspection and analysis without sacrificing state-of-the art performance. We demonstrate model performance and illustrate model interpretability on an intrusion detection task using the Los Alamos National Laboratory (LANL) cyber security dataset, reporting upward of 0.99 area under the receiver operator characteristic curve despite being trained only on a single day's worth of data.