 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssistive Relative Pose Estimation for On-orbit Assembly using Convolutional Neural Networks
Feb 19, 2020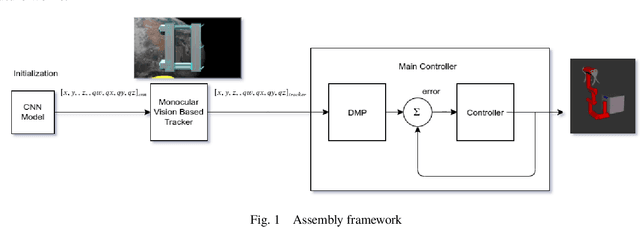
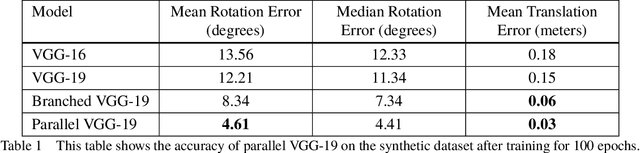
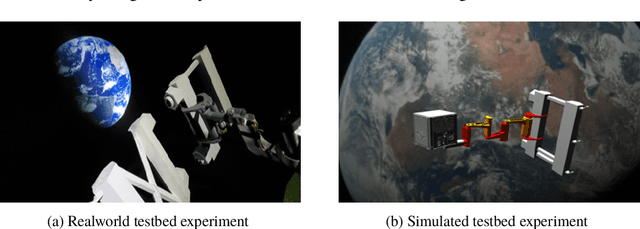
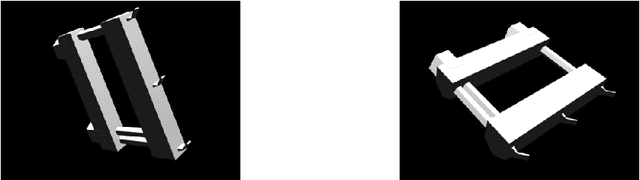
Accurate real-time pose estimation of spacecraft or object in space is a key capability necessary for on-orbit spacecraft servicing and assembly tasks. Pose estimation of objects in space is more challenging than for objects on Earth due to space images containing widely varying illumination conditions, high contrast, and poor resolution in addition to power and mass constraints. In this paper, a convolutional neural network is leveraged to uniquely determine the translation and rotation of an object of interest relative to the camera. The main idea of using CNN model is to assist object tracker used in on space assembly tasks where only feature based method is always not sufficient. The simulation framework designed for assembly task is used to generate dataset for training the modified CNN models and, then results of different models are compared with measure of how accurately models are predicting the pose. Unlike many current approaches for spacecraft or object in space pose estimation, the model does not rely on hand-crafted object-specific features which makes this model more robust and easier to apply to other types of spacecraft. It is shown that the model performs comparable to the current feature-selection methods and can therefore be used in conjunction with them to provide more reliable estimates.