 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMURP: Multi-Agent Ultra-Wideband Relative Pose Estimation with Constrained Communications in 3D Environments
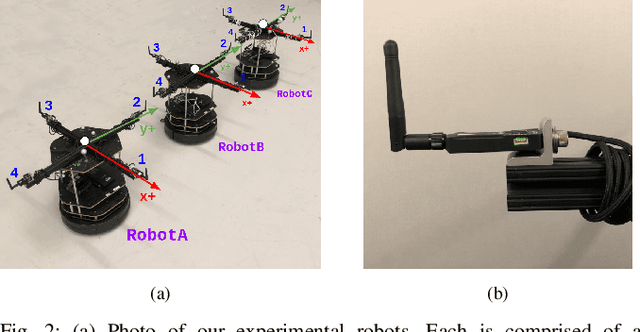
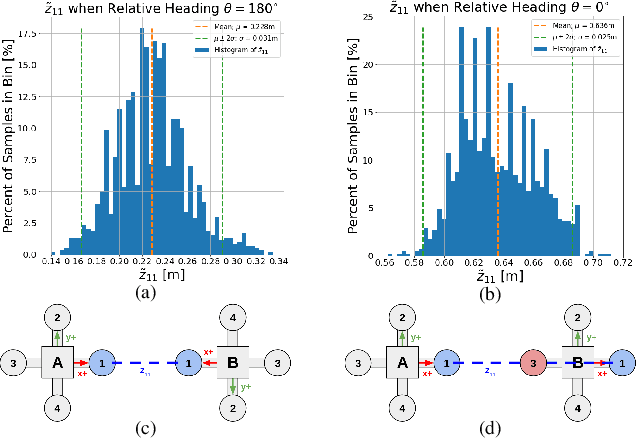
Dec 29, 2023Inter-agent relative localization is critical for many multi-robot systems operating in the absence of external positioning infrastructure or prior environmental knowledge. We propose a novel inter-agent relative 3D pose estimation system where each participating agent is equipped with several ultra-wideband (UWB) ranging tags. Prior work typically supplements noisy UWB range measurements with additional continuously transmitted data, such as odometry, leading to potential scaling issues with increased team size and/or decreased communication network capability. By equipping each agent with multiple UWB antennas, our approach addresses these concerns by using only locally collected UWB range measurements, a priori state constraints, and detections of when said constraints are violated. Leveraging our learned mean ranging bias correction, we gain a 19% positional error improvement giving us experimental mean absolute position and heading errors of 0.24m and 9.5 degrees respectively. When compared to other state-of-the-art approaches, our work demonstrates improved performance over similar systems, while remaining competitive with methods that have significantly higher communication costs. Additionally, we make our datasets available.
Certifiably Correct Range-Aided SLAM
Feb 22, 2023We present the first algorithm capable of efficiently computing certifiably optimal solutions to range-aided simultaneous localization and mapping (RA-SLAM) problems. Robotic navigation systems are increasingly incorporating point-to-point ranging sensors, leading state estimation which takes the form of RA-SLAM. However, the RA-SLAM problem is more difficult to solve than traditional pose-graph SLAM; ranging sensor models introduce additional non-convexity, unlike pose-pose or pose-landmark measurements, a single range measurement does not uniquely determine the relative transform between the involved sensors, and RA-SLAM inference is highly sensitive to initial estimates. Our approach relaxes the RA-SLAM problem to a semidefinite program (SDP), which we show how to solve efficiently using the Riemannian staircase methodology. The solution of this SDP provides a high-quality initialization for our original RA-SLAM problem, which is subsequently refined via local optimization, as well as a lower-bound on the RA-SLAM problem's optimal value. Our algorithm, named certifiably correct RA-SLAM (CORA), applies to problems comprised of arbitrary pose-pose, pose-landmark, and ranging measurements. Evaluation on simulated and real-world marine examples shows that our algorithm frequently produces certifiably optimal RA-SLAM solutions; moreover, even suboptimal estimates are typically within 1-2\% of the optimal value.
Multi-Agent Relative Pose Estimation with UWB and Constrained Communications
Mar 21, 2022

Inter-agent relative localization is critical for any multi-robot system operating in the absence of external positioning infrastructure or prior environmental knowledge. We propose a novel inter-agent relative 2D pose estimation system where each participating agent is equipped with several ultra-wideband (UWB) ranging tags. Prior work typically supplements noisy UWB range measurements with additional continuously transmitted data, such as odometry, making these approaches scale poorly with increased swarm size or decreased communication throughput. This approach addresses these concerns by using only locally collected UWB measurements with no additionally transmitted data. By modeling observed ranging biases and systematic antenna obstructions in our proposed optimization solution, our experimental results demonstrate an improved mean position error (while remaining competitive in other metrics) over a similar state-of-the-art approach that additionally relies on continuously transmitted odometry.