 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Relative Pose Estimation with UWB and Constrained Communications
Paper and Code
Mar 21, 2022
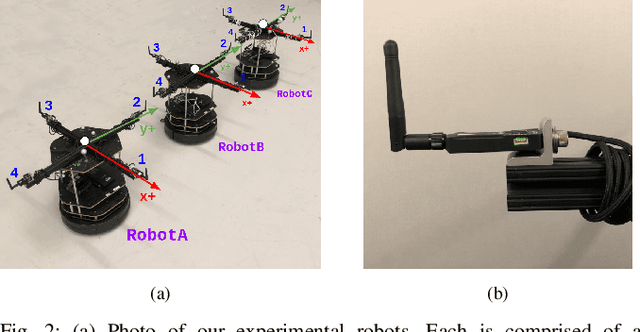
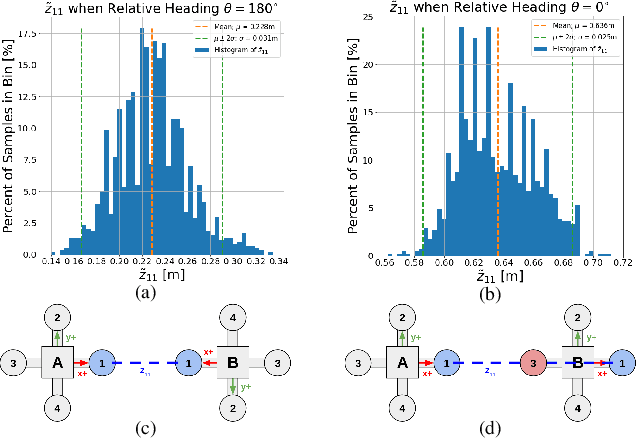

Inter-agent relative localization is critical for any multi-robot system operating in the absence of external positioning infrastructure or prior environmental knowledge. We propose a novel inter-agent relative 2D pose estimation system where each participating agent is equipped with several ultra-wideband (UWB) ranging tags. Prior work typically supplements noisy UWB range measurements with additional continuously transmitted data, such as odometry, making these approaches scale poorly with increased swarm size or decreased communication throughput. This approach addresses these concerns by using only locally collected UWB measurements with no additionally transmitted data. By modeling observed ranging biases and systematic antenna obstructions in our proposed optimization solution, our experimental results demonstrate an improved mean position error (while remaining competitive in other metrics) over a similar state-of-the-art approach that additionally relies on continuously transmitted odometry.