 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA neuromorphic model of the insect visual system for natural image processing
Feb 06, 2026Insect vision supports complex behaviors including associative learning, navigation, and object detection, and has long motivated computational models for understanding biological visual processing. However, many contemporary models prioritize task performance while neglecting biologically grounded processing pathways. Here, we introduce a bio-inspired vision model that captures principles of the insect visual system to transform dense visual input into sparse, discriminative codes. The model is trained using a fully self-supervised contrastive objective, enabling representation learning without labeled data and supporting reuse across tasks without reliance on domain-specific classifiers. We evaluated the resulting representations on flower recognition tasks and natural image benchmarks. The model consistently produced reliable sparse codes that distinguish visually similar inputs. To support different modelling and deployment uses, we have implemented the model as both an artificial neural network and a spiking neural network. In a simulated localization setting, our approach outperformed a simple image downsampling comparison baseline, highlighting the functional benefit of incorporating neuromorphic visual processing pathways. Collectively, these results advance insect computational modelling by providing a generalizable bio-inspired vision model capable of sparse computation across diverse tasks.
Are Transformers Truly Foundational for Robotics?
Nov 25, 2024

Generative Pre-Trained Transformers (GPTs) are hyped to revolutionize robotics. Here we question their utility. GPTs for autonomous robotics demand enormous and costly compute, excessive training times and (often) offboard wireless control. We contrast GPT state of the art with how tiny insect brains have achieved robust autonomy with none of these constraints. We highlight lessons that can be learned from biology to enhance the utility of GPTs in robotics.
EchoVPR: Echo State Networks for Visual Place Recognition
Oct 11, 2021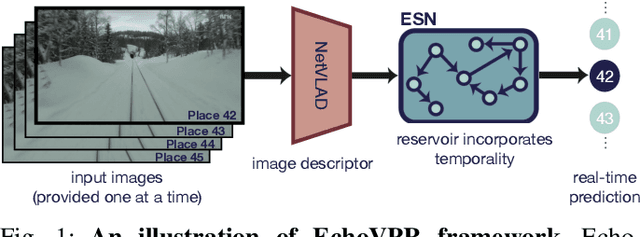
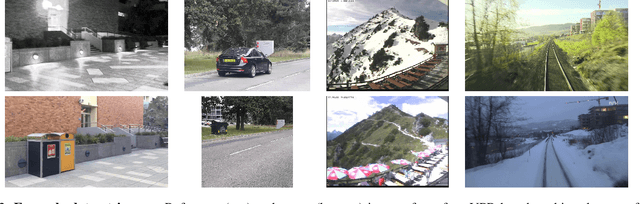
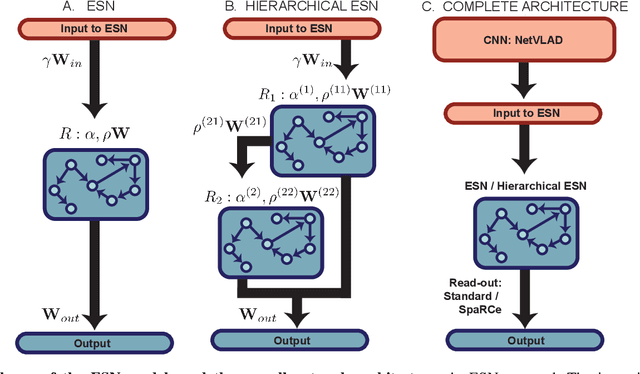
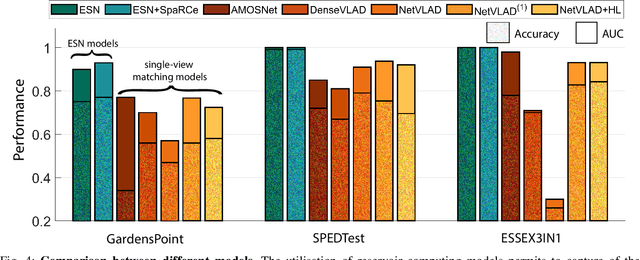
Recognising previously visited locations is an important, but unsolved, task in autonomous navigation. Current visual place recognition (VPR) benchmarks typically challenge models to recover the position of a query image (or images) from sequential datasets that include both spatial and temporal components. Recently, Echo State Network (ESN) varieties have proven particularly powerful at solving machine learning tasks that require spatio-temporal modelling. These networks are simple, yet powerful neural architectures that -- exhibiting memory over multiple time-scales and non-linear high-dimensional representations -- can discover temporal relations in the data while still maintaining linearity in the learning. In this paper, we present a series of ESNs and analyse their applicability to the VPR problem. We report that the addition of ESNs to pre-processed convolutional neural networks led to a dramatic boost in performance in comparison to non-recurrent networks in four standard benchmarks (GardensPoint, SPEDTest, ESSEX3IN1, Nordland) demonstrating that ESNs are able to capture the temporal structure inherent in VPR problems. Moreover, we show that ESNs can outperform class-leading VPR models which also exploit the sequential dynamics of the data. Finally, our results demonstrate that ESNs also improve generalisation abilities, robustness, and accuracy further supporting their suitability to VPR applications.
A Compact Neural Architecture for Visual Place Recognition
Oct 15, 2019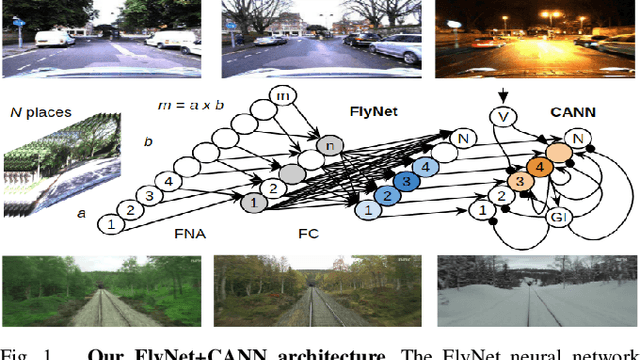
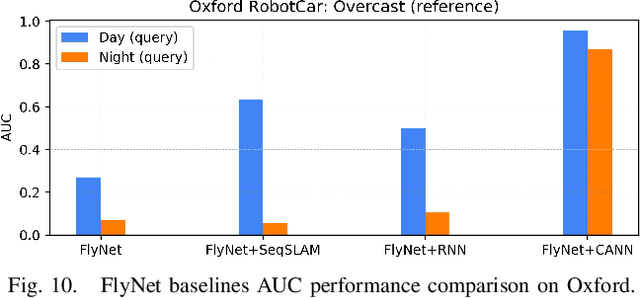
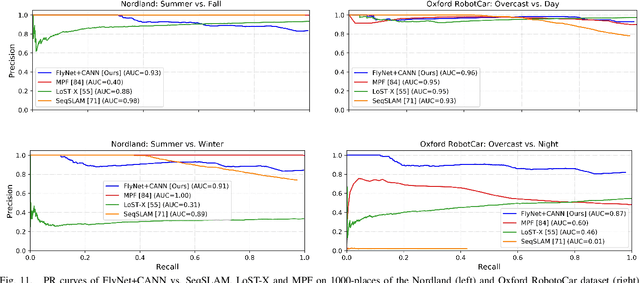
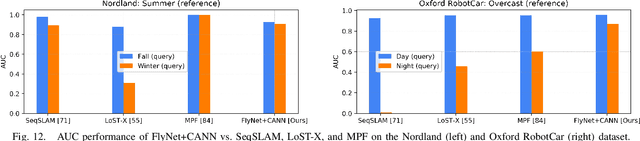
State-of-the-art algorithms for visual place recognition can be broadly split into two categories: computationally expensive deep-learning/image retrieval based techniques with minimal biological plausibility, and computationally cheap, biologically inspired models that yield poor performance in real-world environments. In this paper we present a new compact and high-performing system that bridges this divide for the first time. Our approach comprises two key components: FlyNet, a compact, sparse two-layer neural network inspired by fruit fly brain architectures, and a one-dimensional continuous attractor neural network (CANN). Our FlyNet+CANN network combines the compact pattern recognition capabilities of the FlyNet model with the powerful temporal filtering capabilities of an equally compact CANN, replicating entirely in a neural network implementation the functionality that yields high performance in algorithmic localization approaches like SeqSLAM. We evaluate our approach and compare it to three state-of-the-art methods on two benchmark real-world datasets with small viewpoint changes and extreme appearance variations including different times of day (afternoon to night) where it achieves an AUC performance of 87%, compared to 60% for Multi-Process Fusion, 46% for LoST-X and 1% for SeqSLAM, while being 6.5, 310, and 1.5 times faster respectively.