 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Stage NMPC for a MAV based Collision Free Navigation under Varying Communication Delays
Aug 07, 2022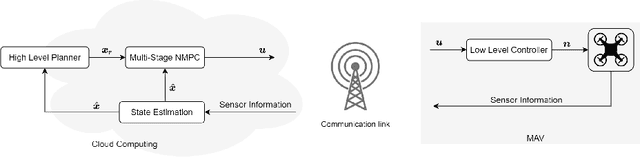


Time delays in communication networks are one of the main concerns in deploying robots with computation boards on the edge. This article proposes a multi-stage Nonlinear Model Predictive Control (NMPC) that is capable of handling varying network-induced time delays for establishing a control framework being able to guarantee collision-free Micro Aerial Vehicles (MAVs) navigation. This study introduces a novel approach that considers different sampling times by a tree of discretization scenarios contrary to the existing typical multi-stage NMPC where system uncertainties are modeled by a tree of scenarios. Additionally, the proposed method considers adaptive weights for the multi-stage NMPC scenarios based on the probability of time delays in the communication link. As a result of the multi-stage NMPC, the obtained optimal control action is valid for multiple sampling times. Finally, the overall effectiveness of the proposed novel control framework is demonstrated in various tests and different simulation environments.
Geometry Aware NMPC Scheme for Morphing Quadrotor Navigation in Restricted Entrances
Jan 08, 2021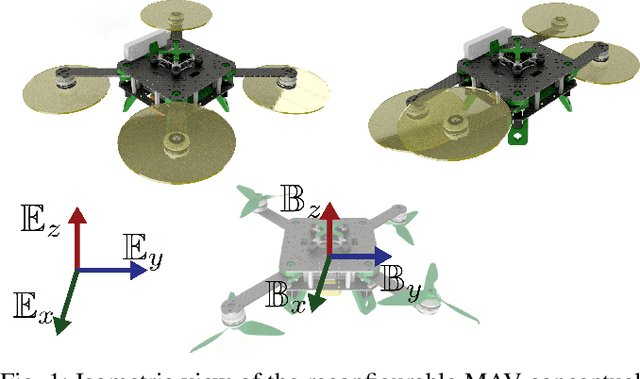
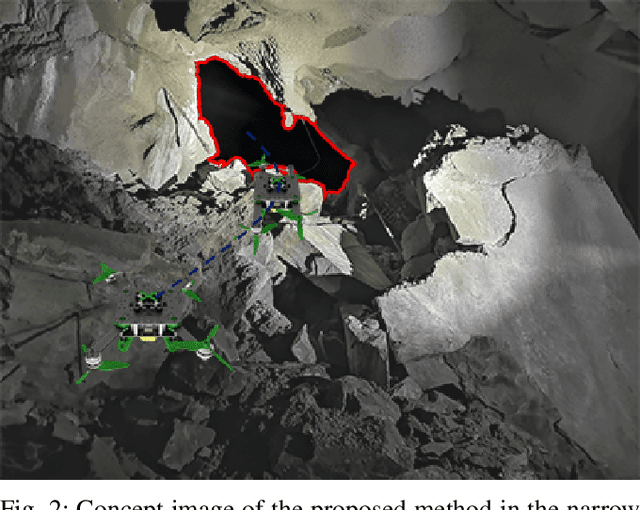
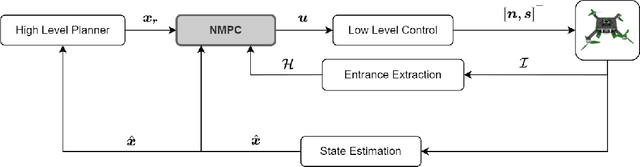

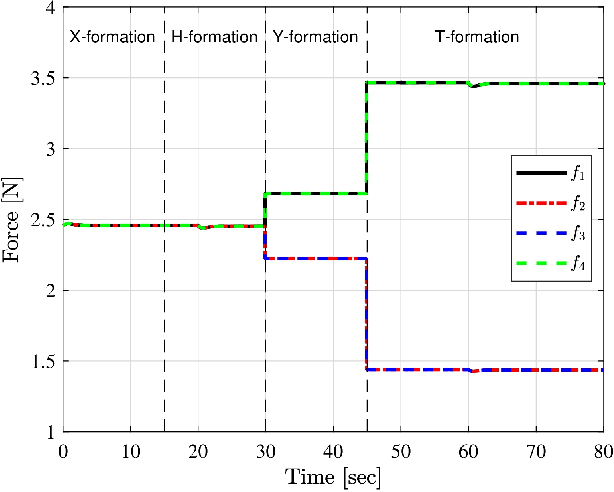
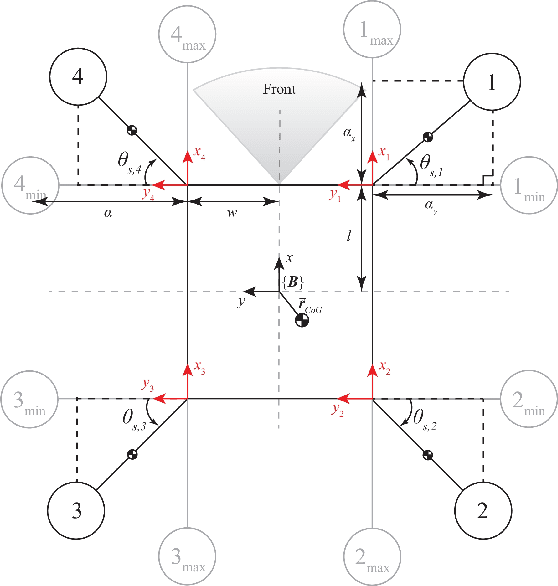
Geometry-morphing Micro Aerial Vehicles (MAVs) are gaining more and more attention lately, since their ability to modify their geometric morphology in-flight increases their versatility, while expanding their application range. In this novel research field, most of the works focus on the platform design and on the low-level control part for maintaining stability after the deformation. Nevertheless, another aspect of geometry morphing MAVs is the association of the deformation with respect to the shape and structure of the environment. In this article, we propose a novel Nonlinear Model Predictive Control (NMPC) structure that modifies the morphology of a quadrotor based on the environmental entrances geometrical shape. The proposed method considers restricted entrances as a constraint in the NMPC and modifies the arm configuration of the MAV to provide a collision free path from the initial position to the desired goal, while passing through the entrance. To the authors' best knowledge, this work is the first to connect the in-flight morphology with the characteristics of environmental shapes. Multiple simulation results depict the performance and efficiency of the proposed scheme in scenarios where the quadrotor is commanded to pass through restricted areas.
Switching Model Predictive Control for Online Structural Reformations of a Foldable Quadrotor
Aug 20, 2020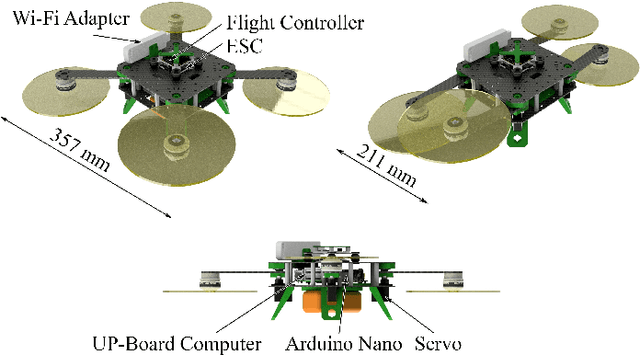
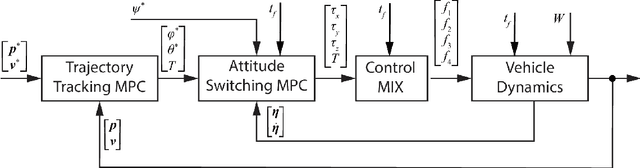
The aim of this article is the formulation of a switching model predictive control framework for the case of a foldable quadrotor with the ability to retain the overall control quality during online structural reformations. The majority of the related scientific publications consider fixed morphology of the aerial vehicles. Recent advances in mechatronics have brought novel considerations for generalized aerial robotic designs with the ability to alter their morphology in order to adapt to their environment, thus enhancing their capabilities. Simulation results are provided to prove the efficacy of the selected control scheme.