Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwitching Model Predictive Control for Online Structural Reformations of a Foldable Quadrotor
Paper and Code
Aug 20, 2020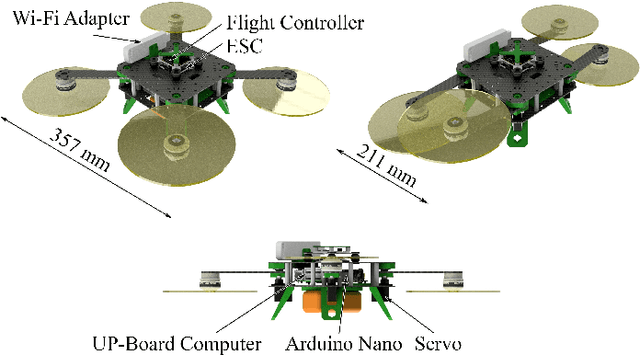
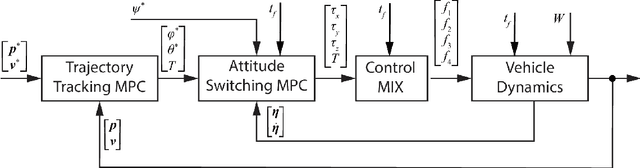
The aim of this article is the formulation of a switching model predictive control framework for the case of a foldable quadrotor with the ability to retain the overall control quality during online structural reformations. The majority of the related scientific publications consider fixed morphology of the aerial vehicles. Recent advances in mechatronics have brought novel considerations for generalized aerial robotic designs with the ability to alter their morphology in order to adapt to their environment, thus enhancing their capabilities. Simulation results are provided to prove the efficacy of the selected control scheme.
View paper on