 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Stage NMPC for a MAV based Collision Free Navigation under Varying Communication Delays
Paper and Code
Aug 07, 2022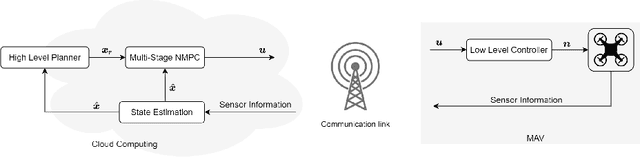


Time delays in communication networks are one of the main concerns in deploying robots with computation boards on the edge. This article proposes a multi-stage Nonlinear Model Predictive Control (NMPC) that is capable of handling varying network-induced time delays for establishing a control framework being able to guarantee collision-free Micro Aerial Vehicles (MAVs) navigation. This study introduces a novel approach that considers different sampling times by a tree of discretization scenarios contrary to the existing typical multi-stage NMPC where system uncertainties are modeled by a tree of scenarios. Additionally, the proposed method considers adaptive weights for the multi-stage NMPC scenarios based on the probability of time delays in the communication link. As a result of the multi-stage NMPC, the obtained optimal control action is valid for multiple sampling times. Finally, the overall effectiveness of the proposed novel control framework is demonstrated in various tests and different simulation environments.