 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUruBots UAV -- Air Emergency Service Indoor Team Description Paper for FIRA 2024
Jun 13, 2024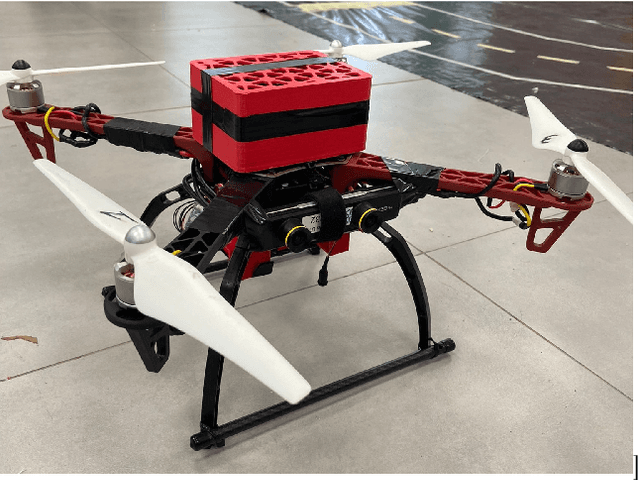
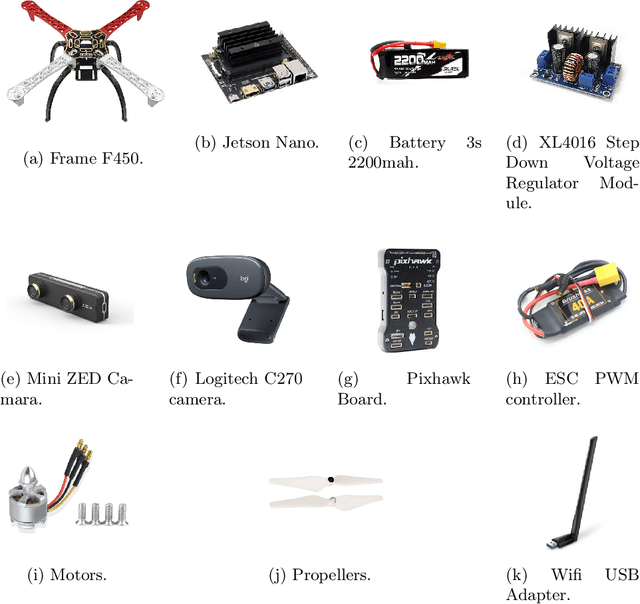
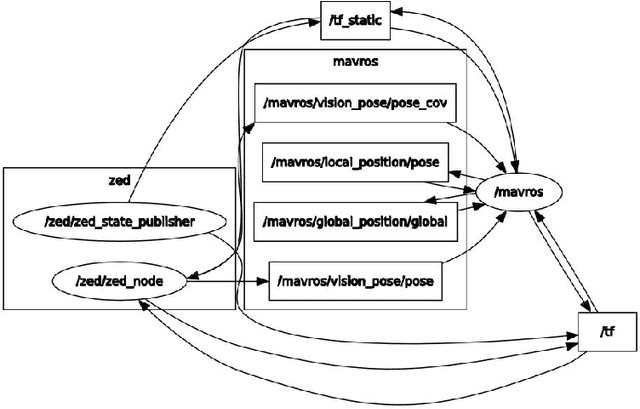
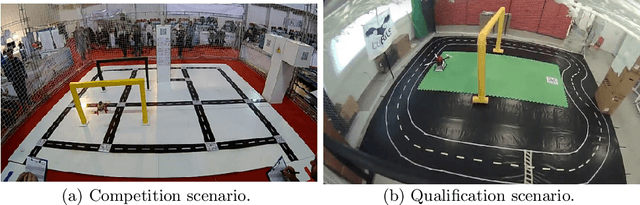
This document addresses the description of the corresponding "Urubots" Team for the 2024 Fira Air League, "Air Emergency Service (Indoor)." We introduce our team and an autonomous Unmanned Aerial Vehicle (UAV) that relies on computer vision for its flight control. This UAV has the capability to perform a wide variety of navigation tasks in indoor environments, without requiring the intervention of an external operator or any form of external processing, resulting in a significant decrease in workload and manual dependence. Additionally, our software has been designed to be compatible with the vehicle's structure and for its application to the competition circuit. In this paper, we detail additional aspects about the mechanical structure, software, and application to the FIRA competition.
UruBots Autonomous Car Team Two: Team Description Paper for FIRA 2024
Jun 13, 2024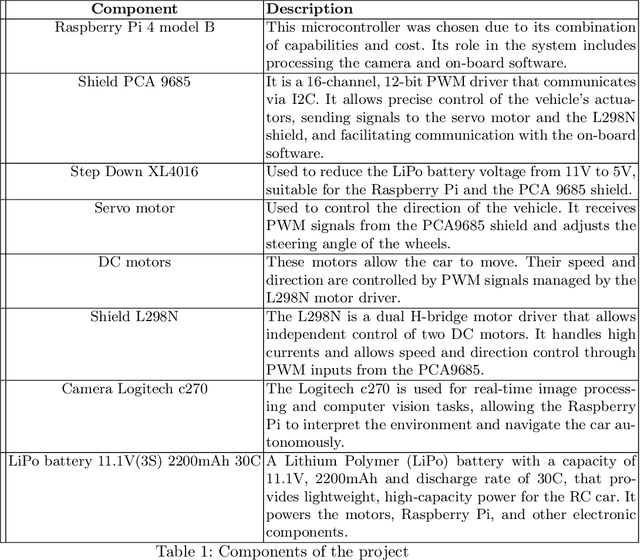

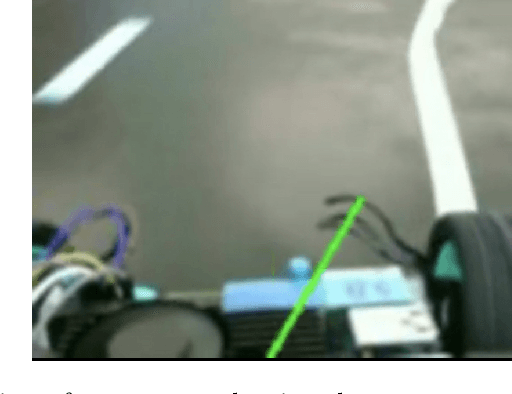
This paper proposes a mini autonomous car to be used by the team UruBots for the 2024 FIRA Autonomous Cars Race Challenge. The vehicle is proposed focusing on a low cost and light weight setup. Powered by a Raspberry PI4 and with a total weight of 1.15 Kilograms, we show that our vehicle manages to race a track of approximately 13 meters in 11 seconds at the best evaluation that was carried out, with an average speed of 1.2m/s in average. That performance was achieved after training a convolutional neural network with 1500 samples for a total amount of 60 epochs. Overall, we believe that our vehicle are suited to perform at the FIRA Autonomous Cars Race Challenge 2024, helping the development of the field of study and the category in the competition.
Diseno y Desarrollo de Prototipos Roboticos para Competencias de Futbol utilizando Motores Dynamixel
Oct 25, 2023This article describes the design and development of robotic prototypes for robotic soccer competitions using Dynamixel motors. Although the prototypes are not aimed at world-class competitions, they represent a significant step in the development of sports robots. Model XL430-W250 Dynamixel motors were chosen and electronic circuits were implemented using control boards such as OpenCR and Raspberry Pi 3. A crucial component was introduced: a step-up board that charges a capacitor to create a powerful kick to the ball via anelectromagnet controlled by Arduino Nano. The programming and coordination of the prototypes was carried out using the ROS environment (Robot Operating System), which allows effective integration of movements and communication. Although the prototypes were not optimized for global competition, they underwent extensive testing, evaluating their speed and maneuverability, as well as soccer tactics in the GRSim simulator. These prototypes contribute to the further development of sports robotics and illustrate the research potential in this exciting area.