 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArtificial Intelligence for All? Brazilian Teachers on Ethics, Equity, and the Everyday Challenges of AI in Education
Dec 29, 2025This study examines the perceptions of Brazilian K-12 education teachers regarding the use of AI in education, specifically General Purpose AI. This investigation employs a quantitative analysis approach, extracting information from a questionnaire completed by 346 educators from various regions of Brazil regarding their AI literacy and use. Educators vary in their educational level, years of experience, and type of educational institution. The analysis of the questionnaires shows that although most educators had only basic or limited knowledge of AI (80.3\%), they showed a strong interest in its application, particularly for the creation of interactive content (80.6%), lesson planning (80.2%), and personalized assessment (68.6%). The potential of AI to promote inclusion and personalized learning is also widely recognized (65.5%). The participants emphasized the importance of discussing ethics and digital citizenship, reflecting on technological dependence, biases, transparency, and responsible use of AI, aligning with critical education and the development of conscious students. Despite enthusiasm for the pedagogical potential of AI, significant structural challenges were identified, including a lack of training (43.4%), technical support (41.9%), and limitations of infrastructure, such as low access to computers, reliable Internet connections, and multimedia resources in schools. The study shows that Brazil is still in a bottom-up model for AI integration, missing official curricula to guide its implementation and structured training for teachers and students. Furthermore, effective implementation of AI depends on integrated public policies, adequate teacher training, and equitable access to technology, promoting ethical, inclusive, and contextually grounded adoption of AI in Brazilian K-12 education.
tsMorph: generation of semi-synthetic time series to understand algorithm performance
Dec 03, 2023Time series forecasting is a subject of significant scientific and industrial importance. Despite the widespread utilization of forecasting methods, there is a dearth of research aimed at comprehending the conditions under which these methods yield favorable or unfavorable performances. Empirical studies, although common, encounter challenges due to the limited availability of datasets, impeding the extraction of reliable insights. To address this, we present tsMorph, a straightforward approach for generating semi-synthetic time series through dataset morphing. tsMorph operates by creating a sequence of datasets derived from two original datasets. These newly generated datasets exhibit a progressive departure from the characteristics of one dataset and a convergence toward the attributes of the other. This method provides a valuable alternative for obtaining substantial datasets. In this paper, we demonstrate the utility of tsMorph by assessing the performance of the Long Short-Term Memory Network forecasting algorithm. The time series under examination are sourced from the NN5 Competition. The findings reveal compelling insights. Notably, the performance of the Long Short-Term Memory Network improves proportionally with the frequency of the time series. These experiments affirm that tsMorph serves as an effective tool for gaining an understanding of forecasting algorithm behaviors, offering a pathway to overcome the limitations posed by empirical studies and enabling more extensive and reliable experimentation.
Learning to associate detections for real-time multiple object tracking
Jul 12, 2020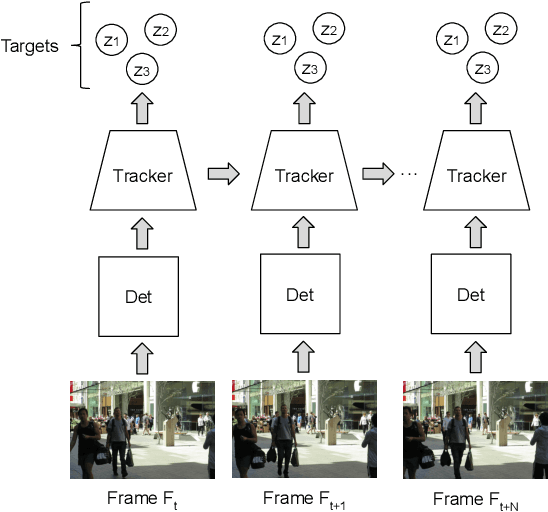
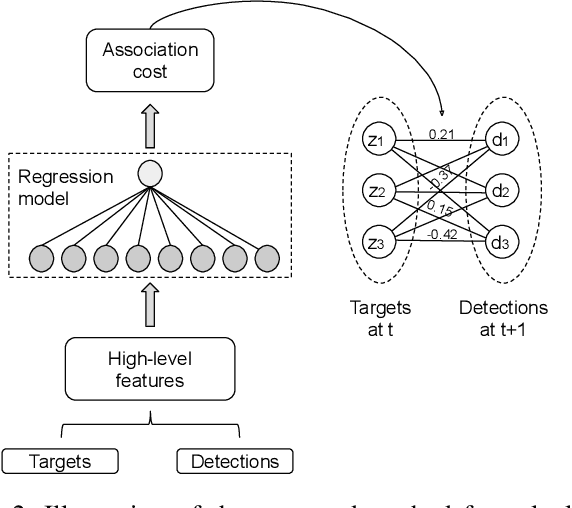
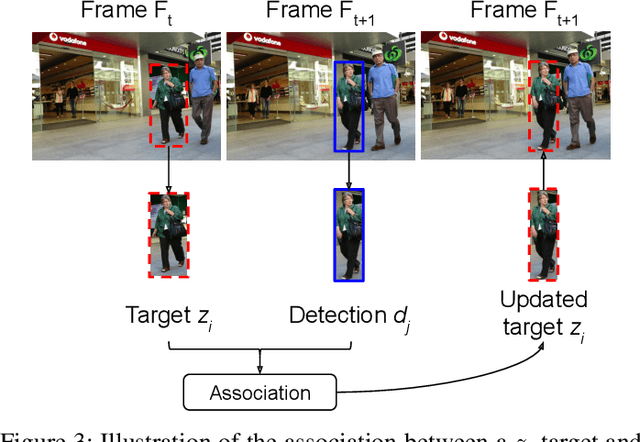
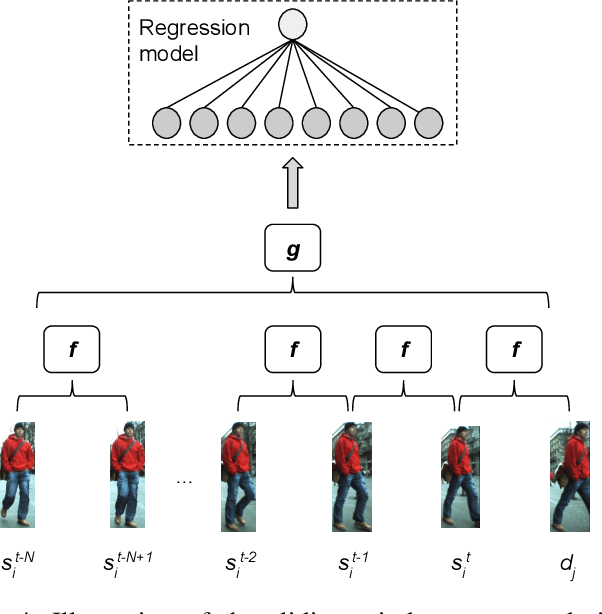
With the recent advances in the object detection research field, tracking-by-detection has become the leading paradigm adopted by multi-object tracking algorithms. By extracting different features from detected objects, those algorithms can estimate the objects' similarities and association patterns along successive frames. However, since similarity functions applied by tracking algorithms are handcrafted, it is difficult to employ them in new contexts. In this study, it is investigated the use of artificial neural networks to learning a similarity function that can be used among detections. During training, the networks were introduced to correct and incorrect association patterns, sampled from a pedestrian tracking data set. For such, different motion and appearance features combinations have been explored. Finally, a trained network has been inserted into a multiple-object tracking framework, which has been assessed on the MOT Challenge benchmark. Throughout the experiments, the proposed tracker matched the results obtained by state-of-the-art methods, it has run 58\% faster than a recent and similar method, used as baseline.