 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Pose Estimation of Two Interacting Hands from a Monocular Event Camera
Dec 21, 2023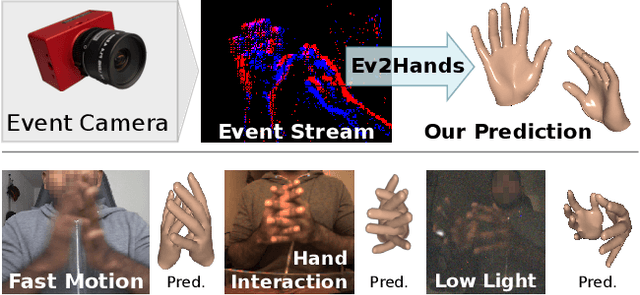

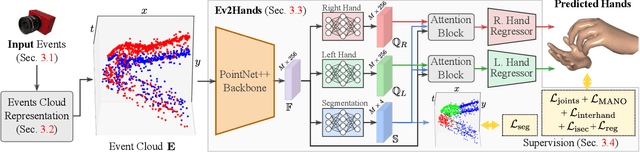
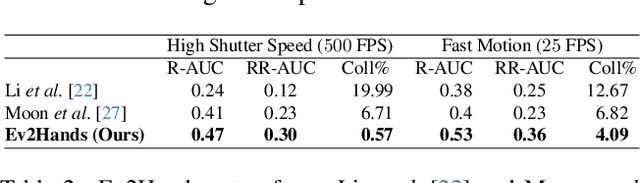
3D hand tracking from a monocular video is a very challenging problem due to hand interactions, occlusions, left-right hand ambiguity, and fast motion. Most existing methods rely on RGB inputs, which have severe limitations under low-light conditions and suffer from motion blur. In contrast, event cameras capture local brightness changes instead of full image frames and do not suffer from the described effects. Unfortunately, existing image-based techniques cannot be directly applied to events due to significant differences in the data modalities. In response to these challenges, this paper introduces the first framework for 3D tracking of two fast-moving and interacting hands from a single monocular event camera. Our approach tackles the left-right hand ambiguity with a novel semi-supervised feature-wise attention mechanism and integrates an intersection loss to fix hand collisions. To facilitate advances in this research domain, we release a new synthetic large-scale dataset of two interacting hands, Ev2Hands-S, and a new real benchmark with real event streams and ground-truth 3D annotations, Ev2Hands-R. Our approach outperforms existing methods in terms of the 3D reconstruction accuracy and generalises to real data under severe light conditions.
* 17 pages, 12 figures, 7 tables; project page: https://4dqv.mpi-inf.mpg.de/Ev2Hands/
Intrinsic Dynamic Shape Prior for Fast, Sequential and Dense Non-Rigid Structure from Motion with Detection of Temporally-Disjoint Rigidity
Sep 05, 2019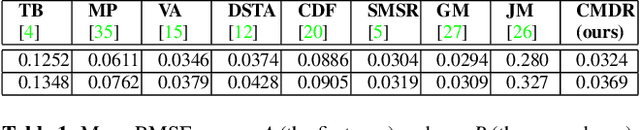


While dense non-rigid structure from motion (NRSfM) has been extensively studied from the perspective of the reconstructability problem over the recent years, almost no attempts have been undertaken to bring it into the practical realm. The reasons for the slow dissemination are the severe ill-posedness, high sensitivity to motion and deformation cues and the difficulty to obtain reliable point tracks in the vast majority of practical scenarios. To fill this gap, we propose a hybrid approach that extracts prior shape knowledge from an input sequence with NRSfM and uses it as a dynamic shape prior for sequential surface recovery in scenarios with recurrence. Our Dynamic Shape Prior Reconstruction (DSPR) method can be combined with existing dense NRSfM techniques while its energy functional is optimised with stochastic gradient descent at real-time rates for new incoming point tracks. The proposed versatile framework with a new core NRSfM approach outperforms several other methods in the ability to handle inaccurate and noisy point tracks, provided we have access to a representative (in terms of the deformation variety) image sequence. Comprehensive experiments highlight convergence properties and the accuracy of DSPR under different disturbing effects. We also perform a joint study of tracking and reconstruction and show applications to shape compression and heart reconstruction under occlusions. We achieve state-of-the-art metrics (accuracy and compression ratios) in different scenarios.