 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-Optimal Path Tracking for Cooperative Manipulators: A Convex Optimization Approach
Mar 13, 2023This paper studies the time-optimal path tracking problem for a team of cooperating robotic manipulators carrying an object. Considering the problem for rigidly grasped objects, we show that it can be cast as a convex optimization problem and solved efficiently with a guarantee of optimality. When formulating the problem, we avoid using a particular wrench distribution and exploit the full actuation available to the system. Then, we consider the problem for grasps using frictional forces and show that this problem also, under a force-closure grasp assumption, can be formulated as a convex optimization problem and solved efficiently and to optimality. To ensure a firm grasp, internal forces have been taken into account in this approach.
Learning the Step-size Policy for the Limited-Memory Broyden-Fletcher-Goldfarb-Shanno Algorithm
Oct 03, 2020
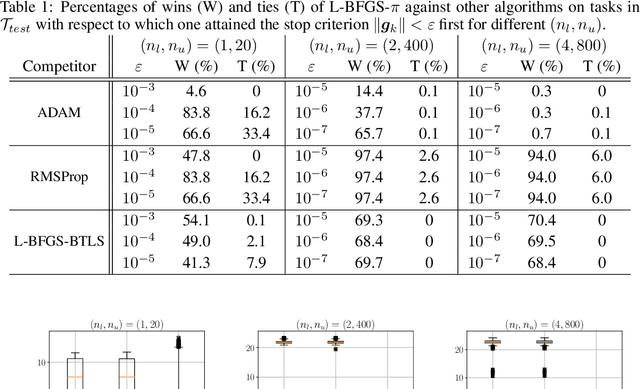
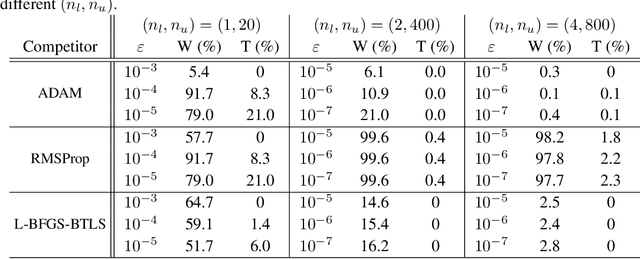
We consider the problem of how to learn a step-size policy for the Limited-Memory Broyden-Fletcher-Goldfarb-Shanno (L-BFGS) algorithm. This is a limited computational memory quasi-Newton method widely used for deterministic unconstrained optimization but currently avoided in large-scale problems for requiring step sizes to be provided at each iteration. Existing methodologies for the step size selection for L-BFGS use heuristic tuning of design parameters and massive re-evaluations of the objective function and gradient to find appropriate step-lengths. We propose a neural network architecture with local information of the current iterate as the input. The step-length policy is learned from data of similar optimization problems, avoids additional evaluations of the objective function, and guarantees that the output step remains inside a pre-defined interval. The corresponding training procedure is formulated as a stochastic optimization problem using the backpropagation through time algorithm. The performance of the proposed method is evaluated on the MNIST database for handwritten digits. The results show that the proposed algorithm outperforms heuristically tuned optimizers such as ADAM and RMSprop in terms of computational time. It performs comparably to more computationally demanding L-BFGS with backtracking line search. The numerical results also show that the learned policy generalizes better to high-dimensional problems as compared to ADAM and RMSprop, highlighting its potential use in large-scale optimization.
A Scalable and Distributed Solution to the Inertial Motion Capture Problem
Aug 18, 2016
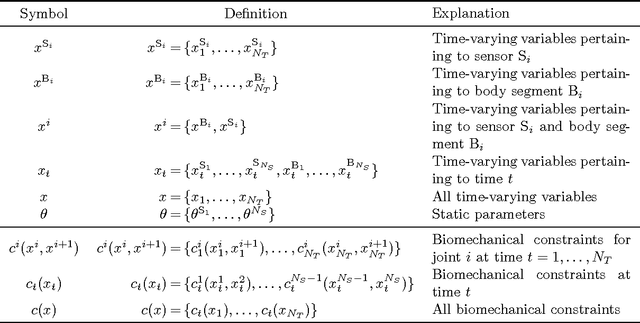
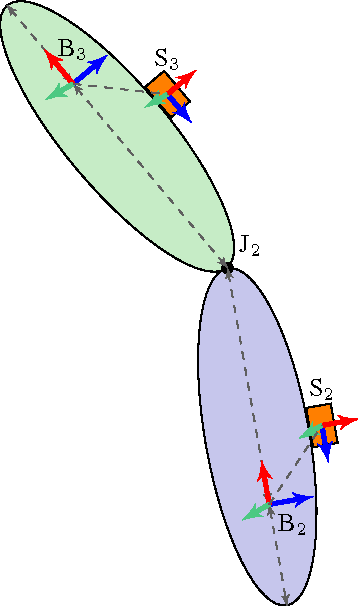
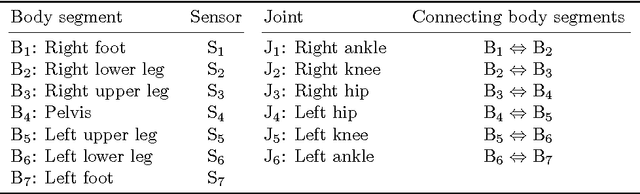
In inertial motion capture, a multitude of body segments are equipped with inertial sensors, consisting of 3D accelerometers and 3D gyroscopes. Using an optimization-based approach to solve the motion capture problem allows for natural inclusion of biomechanical constraints and for modeling the connection of the body segments at the joint locations. The computational complexity of solving this problem grows both with the length of the data set and with the number of sensors and body segments considered. In this work, we present a scalable and distributed solution to this problem using tailored message passing, capable of exploiting the structure that is inherent in the problem. As a proof-of-concept we apply our algorithm to data from a lower body configuration.