 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Start Locations in Ergodic Search for Disaster Response
Jul 03, 2025In disaster response scenarios, deploying robotic teams effectively is crucial for improving situational awareness and enhancing search and rescue operations. The use of robots in search and rescue has been studied but the question of where to start robot deployments has not been addressed. This work addresses the problem of optimally selecting starting locations for robots with heterogeneous capabilities by formulating a joint optimization problem. To determine start locations, this work adds a constraint to the ergodic optimization framework whose minimum assigns robots to start locations. This becomes a little more challenging when the robots are heterogeneous (equipped with different sensing and motion modalities) because not all robots start at the same location, and a more complex adaptation of the aforementioned constraint is applied. Our method assumes access to potential starting locations, which can be obtained from expert knowledge or aerial imagery. We experimentally evaluate the efficacy of our joint optimization approach by comparing it to baseline methods that use fixed starting locations for all robots. Our experimental results show significant gains in coverage performance, with average improvements of 35.98% on synthetic data and 31.91% on real-world data for homogeneous and heterogeneous teams, in terms of the ergodic metric.
Automated Identification of Logical Errors in Programs: Advancing Scalable Analysis of Student Misconceptions
May 16, 2025In Computer Science (CS) education, understanding factors contributing to students' programming difficulties is crucial for effective learning support. By identifying specific issues students face, educators can provide targeted assistance to help them overcome obstacles and improve learning outcomes. While identifying sources of struggle, such as misconceptions, in real-time can be challenging in current educational practices, analyzing logical errors in students' code can offer valuable insights. This paper presents a scalable framework for automatically detecting logical errors in students' programming solutions. Our framework is based on an explainable Abstract Syntax Tree (AST) embedding model, the Subtree-based Attention Neural Network (SANN), that identifies the structural components of programs containing logical errors. We conducted a series of experiments to evaluate its effectiveness, and the results suggest that our framework can accurately capture students' logical errors and, more importantly, provide us with deeper insights into their learning processes, offering a valuable tool for enhancing programming education.
Multi-Agent Ergodic Exploration under Smoke-Based, Time-Varying Sensor Visibility Constraints
Mar 06, 2025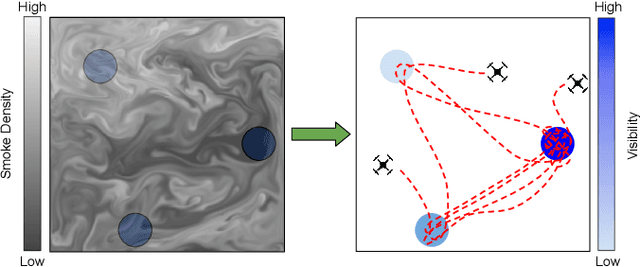
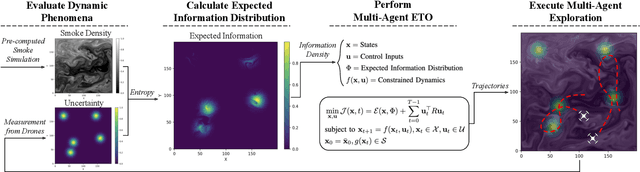
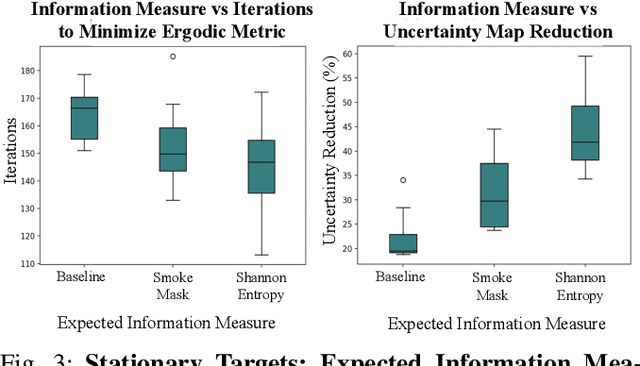
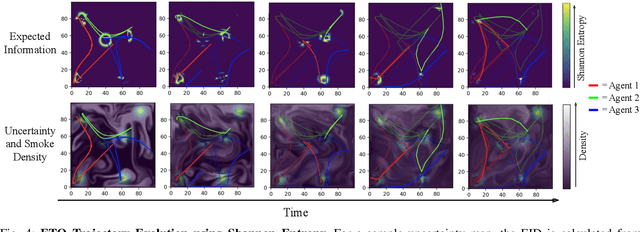
In this work, we consider the problem of multi-agent informative path planning (IPP) for robots whose sensor visibility continuously changes as a consequence of a time-varying natural phenomenon. We leverage ergodic trajectory optimization (ETO), which generates paths such that the amount of time an agent spends in an area is proportional to the expected information in that area. We focus specifically on the problem of multi-agent drone search of a wildfire, where we use the time-varying environmental process of smoke diffusion to construct a sensor visibility model. This sensor visibility model is used to repeatedly calculate an expected information distribution (EID) to be used in the ETO algorithm. Our experiments show that our exploration method achieves improved information gathering over both baseline search methods and naive ergodic search formulations.
Multi-Objective Sparse Sensing with Ergodic Optimization
Sep 29, 2023We consider a search problem where a robot has one or more types of sensors, each suited to detecting different types of targets or target information. Often, information in the form of a distribution of possible target locations, or locations of interest, may be available to guide the search. When multiple types of information exist, then a distribution for each type of information must also exist, thereby making the search problem that uses these distributions to guide the search a multi-objective one. In this paper, we consider a multi-objective search problem when the cost to use a sensor is limited. To this end, we leverage the ergodic metric, which drives agents to spend time in regions proportional to the expected amount of information there. We define the multi-objective sparse sensing ergodic (MO-SS-E) metric in order to optimize when and where each sensor measurement should be taken while planning trajectories that balance the multiple objectives. We observe that our approach maintains coverage performance as the number of samples taken considerably degrades. Further empirical results on different multi-agent problem setups demonstrate the applicability of our approach for both homogeneous and heterogeneous multi-agent teams.
Analysis of Interior Rubble Void Spaces at Champlain Towers South Collapse
Jan 11, 2023



The 2021 Champlain Towers South Condominiums collapse in Surfside, Florida, resulted 98 deaths. Nine people are thought to have survived the initial collapse, and might have been rescued if rescue workers could have located them. Perhaps, if rescue workers had been able to use robots to search the interior of the rubble pile, outcomes might have been better. An improved understanding of the environment in which a robot would have to operate to be able to search the interior of a rubble pile would help roboticists develop better suited robotic platforms and control strategies. To this end, this work offers an approach to characterize and visualize the interior of a rubble pile and conduct a preliminary analysis of the occurrence of voids. Specifically, the analysis makes opportunistic use of four days of aerial imagery gathered from responders at Surfside to create a 3D volumetric aggregated model of the collapse in order to identify and characterize void spaces in the interior of the rubble. The preliminary results confirm expectations of small number and scale of these interior voids. The results can inform better selection and control of existing robots for disaster response, aid in determining the design specifications (specifically scale and form factor), and improve control of future robotic platforms developed for search operations in rubble.
* 6 pages, 7 figures