 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Ergodic Exploration under Smoke-Based, Time-Varying Sensor Visibility Constraints
Mar 06, 2025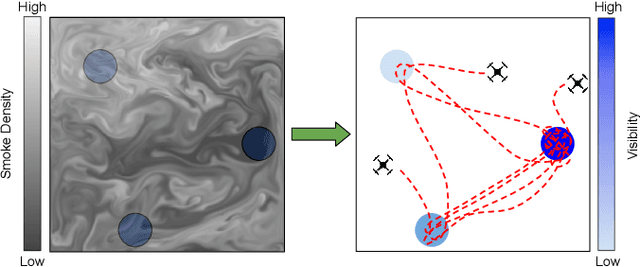
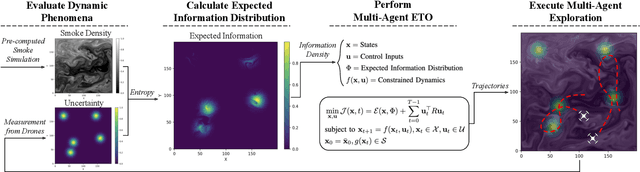
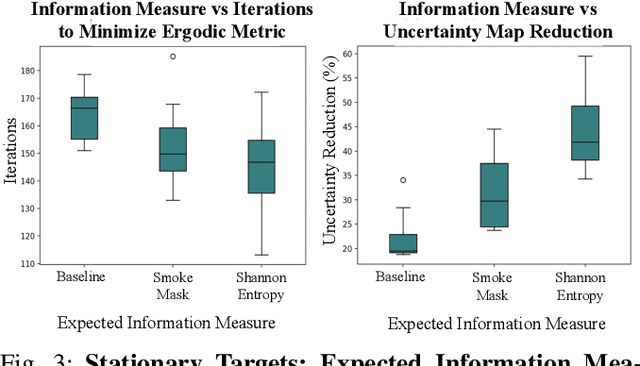
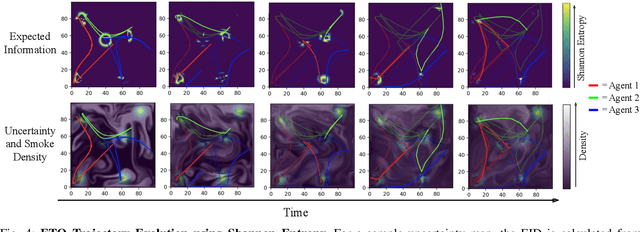
In this work, we consider the problem of multi-agent informative path planning (IPP) for robots whose sensor visibility continuously changes as a consequence of a time-varying natural phenomenon. We leverage ergodic trajectory optimization (ETO), which generates paths such that the amount of time an agent spends in an area is proportional to the expected information in that area. We focus specifically on the problem of multi-agent drone search of a wildfire, where we use the time-varying environmental process of smoke diffusion to construct a sensor visibility model. This sensor visibility model is used to repeatedly calculate an expected information distribution (EID) to be used in the ETO algorithm. Our experiments show that our exploration method achieves improved information gathering over both baseline search methods and naive ergodic search formulations.
Bi-Level Image-Guided Ergodic Exploration with Applications to Planetary Rovers
Jul 31, 2023



We present a method for image-guided exploration for mobile robotic systems. Our approach extends ergodic exploration methods, a recent exploration approach that prioritizes complete coverage of a space, with the use of a learned image classifier that automatically detects objects and updates an information map to guide further exploration and localization of objects. Additionally, to improve outcomes of the information collected by our robot's visual sensor, we present a decomposition of the ergodic optimization problem as bi-level coarse and fine solvers, which act respectively on the robot's body and the robot's visual sensor. Our approach is applied to geological survey and localization of rock formations for Mars rovers, with real images from Mars rovers used to train the image classifier. Results demonstrate 1) improved localization of rock formations compared to naive approaches while 2) minimizing the path length of the exploration through the bi-level exploration.