 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavion: A 2mW Fully Integrated Real-Time Visual-Inertial Odometry Accelerator for Autonomous Navigation of Nano Drones
Sep 15, 2018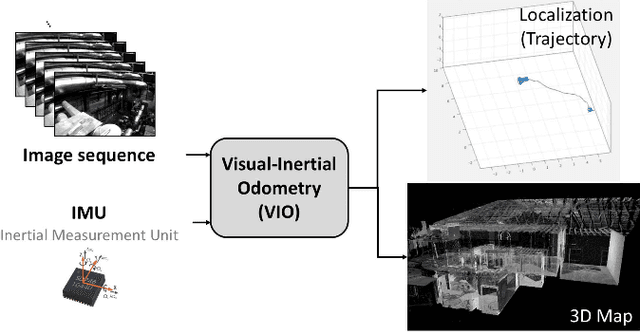
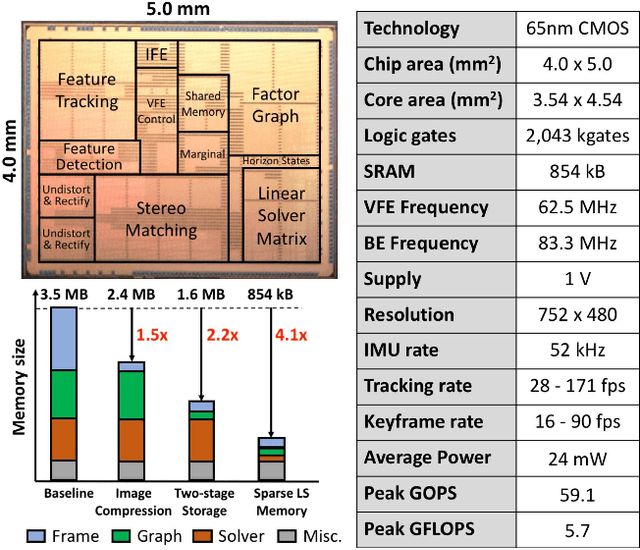
This paper presents Navion, an energy-efficient accelerator for visual-inertial odometry (VIO) that enables autonomous navigation of miniaturized robots (e.g., nano drones), and virtual/augmented reality on portable devices. The chip uses inertial measurements and mono/stereo images to estimate the drone's trajectory and a 3D map of the environment. This estimate is obtained by running a state-of-the-art VIO algorithm based on non-linear factor graph optimization, which requires large irregularly structured memories and heterogeneous computation flow. To reduce the energy consumption and footprint, the entire VIO system is fully integrated on chip to eliminate costly off-chip processing and storage. This work uses compression and exploits both structured and unstructured sparsity to reduce on-chip memory size by 4.1$\times$. Parallelism is used under tight area constraints to increase throughput by 43%. The chip is fabricated in 65nm CMOS, and can process 752$\times$480 stereo images from EuRoC dataset in real-time at 20 frames per second (fps) consuming only an average power of 2mW. At its peak performance, Navion can process stereo images at up to 171 fps and inertial measurements at up to 52 kHz, while consuming an average of 24mW. The chip is configurable to maximize accuracy, throughput and energy-efficiency trade-offs and to adapt to different environments. To the best of our knowledge, this is the first fully integrated VIO system in an ASIC.
Hardware for Machine Learning: Challenges and Opportunities
Oct 17, 2017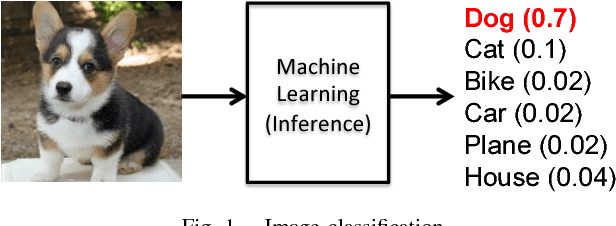

Machine learning plays a critical role in extracting meaningful information out of the zetabytes of sensor data collected every day. For some applications, the goal is to analyze and understand the data to identify trends (e.g., surveillance, portable/wearable electronics); in other applications, the goal is to take immediate action based the data (e.g., robotics/drones, self-driving cars, smart Internet of Things). For many of these applications, local embedded processing near the sensor is preferred over the cloud due to privacy or latency concerns, or limitations in the communication bandwidth. However, at the sensor there are often stringent constraints on energy consumption and cost in addition to throughput and accuracy requirements. Furthermore, flexibility is often required such that the processing can be adapted for different applications or environments (e.g., update the weights and model in the classifier). In many applications, machine learning often involves transforming the input data into a higher dimensional space, which, along with programmable weights, increases data movement and consequently energy consumption. In this paper, we will discuss how these challenges can be addressed at various levels of hardware design ranging from architecture, hardware-friendly algorithms, mixed-signal circuits, and advanced technologies (including memories and sensors).
Towards Closing the Energy Gap Between HOG and CNN Features for Embedded Vision
Mar 17, 2017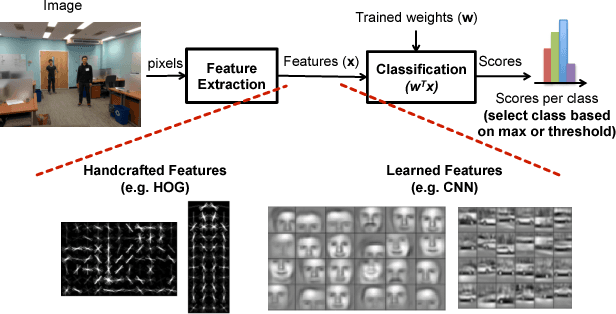
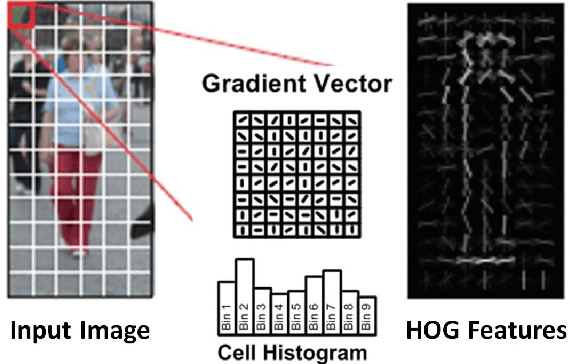


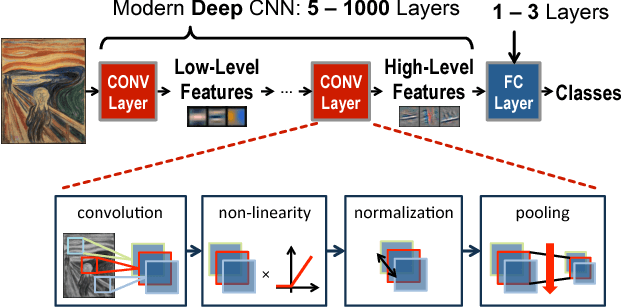
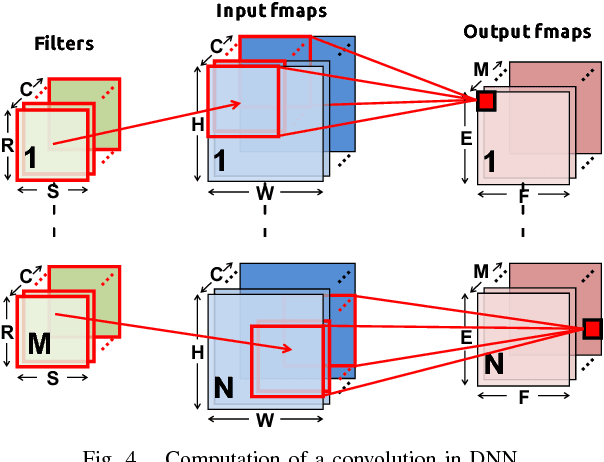
Computer vision enables a wide range of applications in robotics/drones, self-driving cars, smart Internet of Things, and portable/wearable electronics. For many of these applications, local embedded processing is preferred due to privacy and/or latency concerns. Accordingly, energy-efficient embedded vision hardware delivering real-time and robust performance is crucial. While deep learning is gaining popularity in several computer vision algorithms, a significant energy consumption difference exists compared to traditional hand-crafted approaches. In this paper, we provide an in-depth analysis of the computation, energy and accuracy trade-offs between learned features such as deep Convolutional Neural Networks (CNN) and hand-crafted features such as Histogram of Oriented Gradients (HOG). This analysis is supported by measurements from two chips that implement these algorithms. Our goal is to understand the source of the energy discrepancy between the two approaches and to provide insight about the potential areas where CNNs can be improved and eventually approach the energy-efficiency of HOG while maintaining its outstanding performance accuracy.
A 58.6mW Real-Time Programmable Object Detector with Multi-Scale Multi-Object Support Using Deformable Parts Model on 1920x1080 Video at 30fps
Jul 27, 2016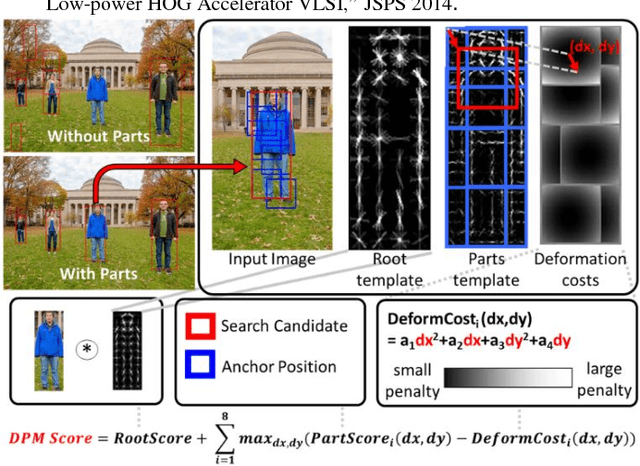
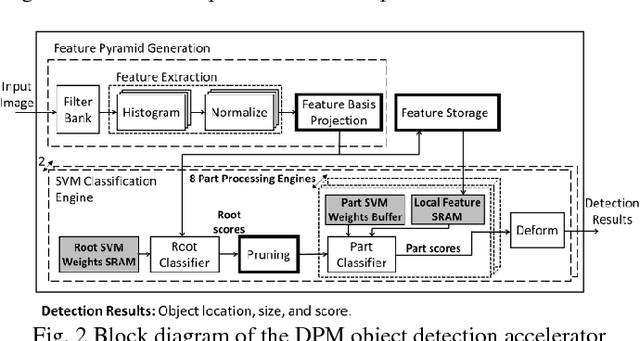
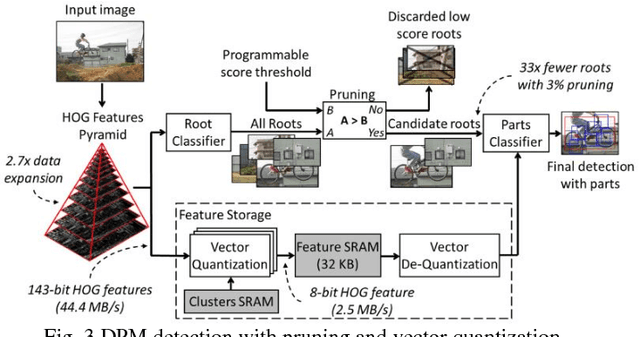
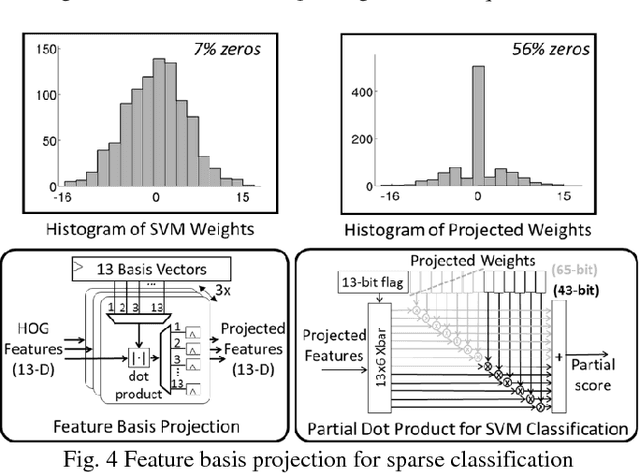
This paper presents a programmable, energy-efficient and real-time object detection accelerator using deformable parts models (DPM), with 2x higher accuracy than traditional rigid body models. With 8 deformable parts detection, three methods are used to address the high computational complexity: classification pruning for 33x fewer parts classification, vector quantization for 15x memory size reduction, and feature basis projection for 2x reduction of the cost of each classification. The chip is implemented in 65nm CMOS technology, and can process HD (1920x1080) images at 30fps without any off-chip storage while consuming only 58.6mW (0.94nJ/pixel, 1168 GOPS/W). The chip has two classification engines to simultaneously detect two different classes of objects. With a tested high throughput of 60fps, the classification engines can be time multiplexed to detect even more than two object classes. It is energy scalable by changing the pruning factor or disabling the parts classification.