 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShapeY: A Principled Framework for Measuring Shape Recognition Capacity via Nearest-Neighbor Matching
Apr 27, 2026Object recognition (OR) in humans relies heavily on shape cues and the ability to recognize objects across varying 3D viewpoints. Unlike humans, deep networks often rely on non-shape cues such as texture and background, leading to vulnerabilities in generalization and robustness. To address this gap, we introduce ShapeY, a novel and principled benchmarking framework designed to evaluate shape-based recognition capability in OR systems. ShapeY comprises 68,200 grayscale images of 200 3D objects rendered from multiple viewpoints and optionally subjected to non-shape ``appearance'' changes. Using a nearest-neighbor matching task, ShapeY specifically probes the fine-grained structure of an OR system's embedding space by evaluating whether object views are clustered by 3D shape similarity across varying 3D viewpoints and other non-shape changes. ShapeY provides a suite of quantitative and qualitative performance readouts, including error rate graphs, viewpoint tuning curves, histograms of positive and negative matching scores, and grids showing ordered best matches, which together offer a comprehensive evaluation of an OR system's shape understanding capability. Testing of 321 pre-trained networks with diverse architectures reveals significant challenges in achieving robust shape-based recognition: even state-of-the-art models struggle to generalize consistently across 3D viewpoint and appearance changes, and are prone to infrequent but egregious matches of objects of obviously completely different shape. ShapeY establishes a principled framework for advancing artificial vision systems toward human-like shape recognition capabilities, emphasizing the importance of disentangled and invariant object encodings.
Uncertainty Quantification in Continual Open-World Learning
Dec 21, 2024



AI deployed in the real-world should be capable of autonomously adapting to novelties encountered after deployment. Yet, in the field of continual learning, the reliance on novelty and labeling oracles is commonplace albeit unrealistic. This paper addresses a challenging and under-explored problem: a deployed AI agent that continuously encounters unlabeled data - which may include both unseen samples of known classes and samples from novel (unknown) classes - and must adapt to it continuously. To tackle this challenge, we propose our method COUQ "Continual Open-world Uncertainty Quantification", an iterative uncertainty estimation algorithm tailored for learning in generalized continual open-world multi-class settings. We rigorously apply and evaluate COUQ on key sub-tasks in the Continual Open-World: continual novelty detection, uncertainty guided active learning, and uncertainty guided pseudo-labeling for semi-supervised CL. We demonstrate the effectiveness of our method across multiple datasets, ablations, backbones and performance superior to state-of-the-art.
ShapeY: Measuring Shape Recognition Capacity Using Nearest Neighbor Matching
Nov 16, 2021
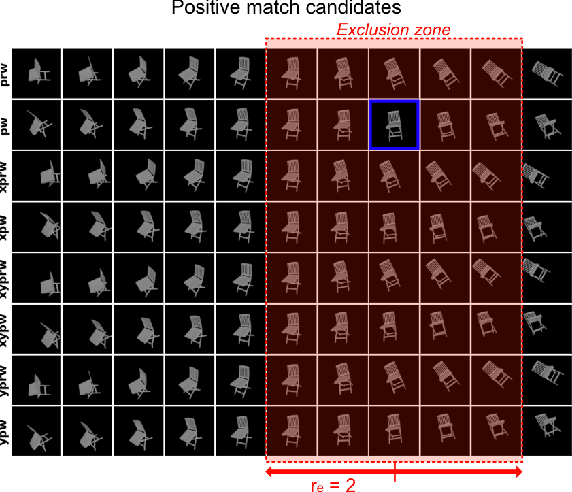
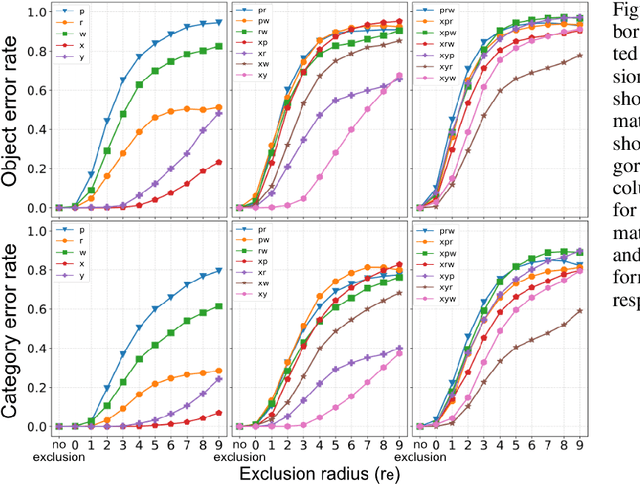
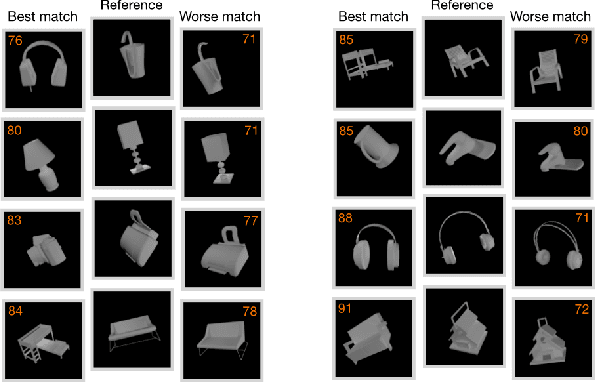
Object recognition in humans depends primarily on shape cues. We have developed a new approach to measuring the shape recognition performance of a vision system based on nearest neighbor view matching within the system's embedding space. Our performance benchmark, ShapeY, allows for precise control of task difficulty, by enforcing that view matching span a specified degree of 3D viewpoint change and/or appearance change. As a first test case we measured the performance of ResNet50 pre-trained on ImageNet. Matching error rates were high. For example, a 27 degree change in object pitch led ResNet50 to match the incorrect object 45% of the time. Appearance changes were also highly disruptive. Examination of false matches indicates that ResNet50's embedding space is severely "tangled". These findings suggest ShapeY can be a useful tool for charting the progress of artificial vision systems towards human-level shape recognition capabilities.