 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSharp Monocular View Synthesis in Less Than a Second
Dec 11, 2025We present SHARP, an approach to photorealistic view synthesis from a single image. Given a single photograph, SHARP regresses the parameters of a 3D Gaussian representation of the depicted scene. This is done in less than a second on a standard GPU via a single feedforward pass through a neural network. The 3D Gaussian representation produced by SHARP can then be rendered in real time, yielding high-resolution photorealistic images for nearby views. The representation is metric, with absolute scale, supporting metric camera movements. Experimental results demonstrate that SHARP delivers robust zero-shot generalization across datasets. It sets a new state of the art on multiple datasets, reducing LPIPS by 25-34% and DISTS by 21-43% versus the best prior model, while lowering the synthesis time by three orders of magnitude. Code and weights are provided at https://github.com/apple/ml-sharp
Depth Pro: Sharp Monocular Metric Depth in Less Than a Second
Oct 02, 2024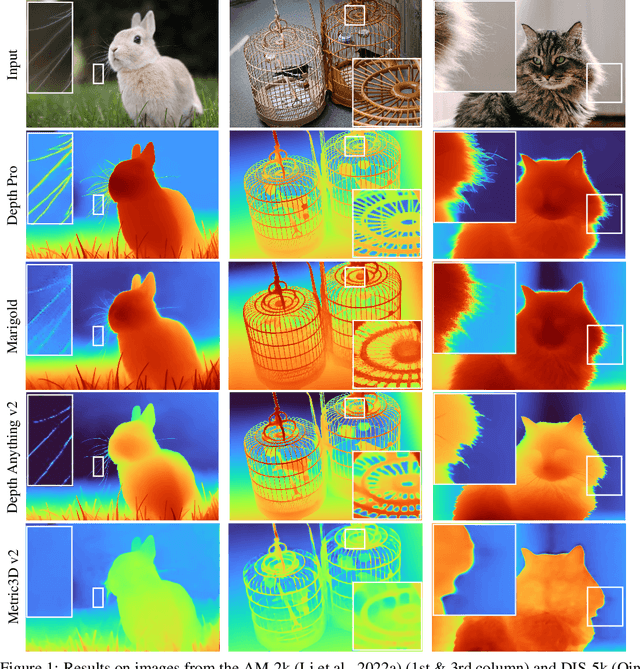
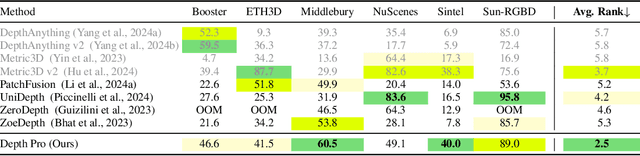
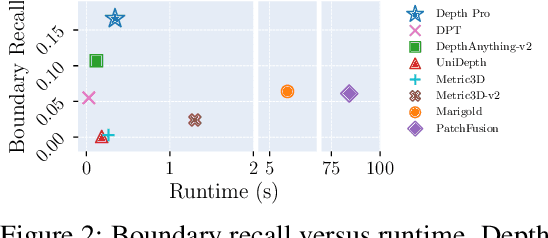
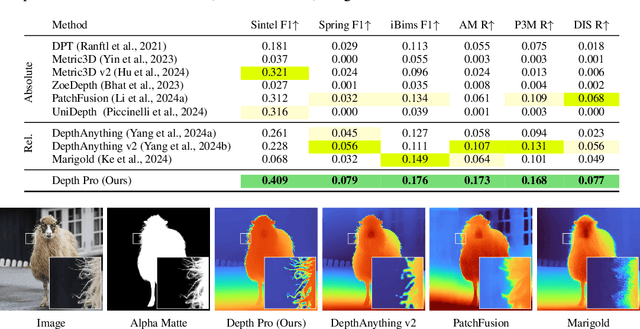
We present a foundation model for zero-shot metric monocular depth estimation. Our model, Depth Pro, synthesizes high-resolution depth maps with unparalleled sharpness and high-frequency details. The predictions are metric, with absolute scale, without relying on the availability of metadata such as camera intrinsics. And the model is fast, producing a 2.25-megapixel depth map in 0.3 seconds on a standard GPU. These characteristics are enabled by a number of technical contributions, including an efficient multi-scale vision transformer for dense prediction, a training protocol that combines real and synthetic datasets to achieve high metric accuracy alongside fine boundary tracing, dedicated evaluation metrics for boundary accuracy in estimated depth maps, and state-of-the-art focal length estimation from a single image. Extensive experiments analyze specific design choices and demonstrate that Depth Pro outperforms prior work along multiple dimensions. We release code and weights at https://github.com/apple/ml-depth-pro
Automatic 3D Reconstruction of Manifold Meshes via Delaunay Triangulation and Mesh Sweeping
Apr 21, 2016



In this paper we propose a new approach to incrementally initialize a manifold surface for automatic 3D reconstruction from images. More precisely we focus on the automatic initialization of a 3D mesh as close as possible to the final solution; indeed many approaches require a good initial solution for further refinement via multi-view stereo techniques. Our novel algorithm automatically estimates an initial manifold mesh for surface evolving multi-view stereo algorithms, where the manifold property needs to be enforced. It bootstraps from 3D points extracted via Structure from Motion, then iterates between a state-of-the-art manifold reconstruction step and a novel mesh sweeping algorithm that looks for new 3D points in the neighborhood of the reconstructed manifold to be added in the manifold reconstruction. The experimental results show quantitatively that the mesh sweeping improves the resolution and the accuracy of the manifold reconstruction, allowing a better convergence of state-of-the-art surface evolution multi-view stereo algorithms.