 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Future Capabilities Agent for Tactical Air Traffic Control
Jan 07, 2026Escalating air traffic demand is driving the adoption of automation to support air traffic controllers, but existing approaches face a trade-off between safety assurance and interpretability. Optimisation-based methods such as reinforcement learning offer strong performance but are difficult to verify and explain, while rules-based systems are transparent yet rarely check safety under uncertainty. This paper outlines Agent Mallard, a forward-planning, rules-based agent for tactical control in systemised airspace that embeds a stochastic digital twin directly into its conflict-resolution loop. Mallard operates on predefined GPS-guided routes, reducing continuous 4D vectoring to discrete choices over lanes and levels, and constructs hierarchical plans from an expert-informed library of deconfliction strategies. A depth-limited backtracking search uses causal attribution, topological plan splicing, and monotonic axis constraints to seek a complete safe plan for all aircraft, validating each candidate manoeuvre against uncertain execution scenarios (e.g., wind variation, pilot response, communication loss) before commitment. Preliminary walkthroughs with UK controllers and initial tests in the BluebirdDT airspace digital twin indicate that Mallard's behaviour aligns with expert reasoning and resolves conflicts in simplified scenarios. The architecture is intended to combine model-based safety assessment, interpretable decision logic, and tractable computational performance in future structured en-route environments.
Learning strange attractors with reservoir systems
Aug 11, 2021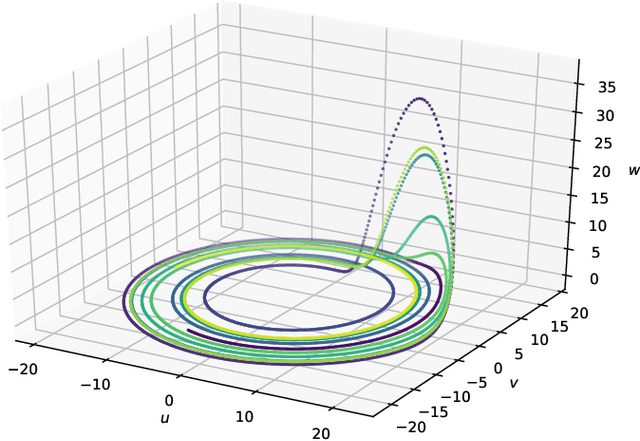



This paper shows that the celebrated Embedding Theorem of Takens is a particular case of a much more general statement according to which, randomly generated linear state-space representations of generic observations of an invertible dynamical system carry in their wake an embedding of the phase space dynamics into the chosen Euclidean state space. This embedding coincides with a natural generalized synchronization that arises in this setup and that yields a topological conjugacy between the state-space dynamics driven by the generic observations of the dynamical system and the dynamical system itself. This result provides additional tools for the representation, learning, and analysis of chaotic attractors and sheds additional light on the reservoir computing phenomenon that appears in the context of recurrent neural networks.