 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Action-Stacking Improves Reinforcement Learning Performance for Air Traffic Control
Jan 07, 2026We introduce online action-stacking, an inference-time wrapper for reinforcement learning policies that produces realistic air traffic control commands while allowing training on a much smaller discrete action space. Policies are trained with simple incremental heading or level adjustments, together with an action-damping penalty that reduces instruction frequency and leads agents to issue commands in short bursts. At inference, online action-stacking compiles these bursts of primitive actions into domain-appropriate compound clearances. Using Proximal Policy Optimisation and the BluebirdDT digital twin platform, we train agents to navigate aircraft along lateral routes, manage climb and descent to target flight levels, and perform two-aircraft collision avoidance under a minimum separation constraint. In our lateral navigation experiments, action stacking greatly reduces the number of issued instructions relative to a damped baseline and achieves comparable performance to a policy trained with a 37-dimensional action space, despite operating with only five actions. These results indicate that online action-stacking helps bridge a key gap between standard reinforcement learning formulations and operational ATC requirements, and provides a simple mechanism for scaling to more complex control scenarios.
Human-in-the-Loop Testing of AI Agents for Air Traffic Control with a Regulated Assessment Framework
Jan 07, 2026We present a rigorous, human-in-the-loop evaluation framework for assessing the performance of AI agents on the task of Air Traffic Control, grounded in a regulator-certified simulator-based curriculum used for training and testing real-world trainee controllers. By leveraging legally regulated assessments and involving expert human instructors in the evaluation process, our framework enables a more authentic and domain-accurate measurement of AI performance. This work addresses a critical gap in the existing literature: the frequent misalignment between academic representations of Air Traffic Control and the complexities of the actual operational environment. It also lays the foundations for effective future human-machine teaming paradigms by aligning machine performance with human assessment targets.
A Future Capabilities Agent for Tactical Air Traffic Control
Jan 07, 2026Escalating air traffic demand is driving the adoption of automation to support air traffic controllers, but existing approaches face a trade-off between safety assurance and interpretability. Optimisation-based methods such as reinforcement learning offer strong performance but are difficult to verify and explain, while rules-based systems are transparent yet rarely check safety under uncertainty. This paper outlines Agent Mallard, a forward-planning, rules-based agent for tactical control in systemised airspace that embeds a stochastic digital twin directly into its conflict-resolution loop. Mallard operates on predefined GPS-guided routes, reducing continuous 4D vectoring to discrete choices over lanes and levels, and constructs hierarchical plans from an expert-informed library of deconfliction strategies. A depth-limited backtracking search uses causal attribution, topological plan splicing, and monotonic axis constraints to seek a complete safe plan for all aircraft, validating each candidate manoeuvre against uncertain execution scenarios (e.g., wind variation, pilot response, communication loss) before commitment. Preliminary walkthroughs with UK controllers and initial tests in the BluebirdDT airspace digital twin indicate that Mallard's behaviour aligns with expert reasoning and resolves conflicts in simplified scenarios. The architecture is intended to combine model-based safety assessment, interpretable decision logic, and tractable computational performance in future structured en-route environments.
Air Traffic Controller Task Demand via Graph Neural Networks: An Interpretable Approach to Airspace Complexity
Jul 17, 2025Real-time assessment of near-term Air Traffic Controller (ATCO) task demand is a critical challenge in an increasingly crowded airspace, as existing complexity metrics often fail to capture nuanced operational drivers beyond simple aircraft counts. This work introduces an interpretable Graph Neural Network (GNN) framework to address this gap. Our attention-based model predicts the number of upcoming clearances, the instructions issued to aircraft by ATCOs, from interactions within static traffic scenarios. Crucially, we derive an interpretable, per-aircraft task demand score by systematically ablating aircraft and measuring the impact on the model's predictions. Our framework significantly outperforms an ATCO-inspired heuristic and is a more reliable estimator of scenario complexity than established baselines. The resulting tool can attribute task demand to specific aircraft, offering a new way to analyse and understand the drivers of complexity for applications in controller training and airspace redesign.
Context-Aware Generative Models for Prediction of Aircraft Ground Tracks
Sep 26, 2023Trajectory prediction (TP) plays an important role in supporting the decision-making of Air Traffic Controllers (ATCOs). Traditional TP methods are deterministic and physics-based, with parameters that are calibrated using aircraft surveillance data harvested across the world. These models are, therefore, agnostic to the intentions of the pilots and ATCOs, which can have a significant effect on the observed trajectory, particularly in the lateral plane. This work proposes a generative method for lateral TP, using probabilistic machine learning to model the effect of the epistemic uncertainty arising from the unknown effect of pilot behaviour and ATCO intentions. The models are trained to be specific to a particular sector, allowing local procedures such as coordinated entry and exit points to be modelled. A dataset comprising a week's worth of aircraft surveillance data, passing through a busy sector of the United Kingdom's upper airspace, was used to train and test the models. Specifically, a piecewise linear model was used as a functional, low-dimensional representation of the ground tracks, with its control points determined by a generative model conditioned on partial context. It was found that, of the investigated models, a Bayesian Neural Network using the Laplace approximation was able to generate the most plausible trajectories in order to emulate the flow of traffic through the sector.
How Bayesian Should Bayesian Optimisation Be?
May 03, 2021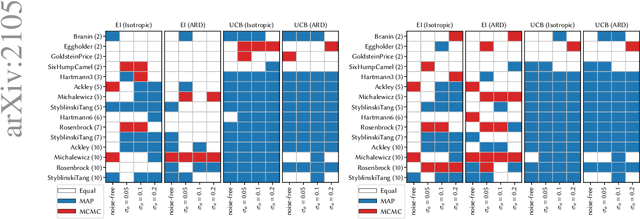



Bayesian optimisation (BO) uses probabilistic surrogate models - usually Gaussian processes (GPs) - for the optimisation of expensive black-box functions. At each BO iteration, the GP hyperparameters are fit to previously-evaluated data by maximising the marginal likelihood. However, this fails to account for uncertainty in the hyperparameters themselves, leading to overconfident model predictions. This uncertainty can be accounted for by taking the Bayesian approach of marginalising out the model hyperparameters. We investigate whether a fully-Bayesian treatment of the Gaussian process hyperparameters in BO (FBBO) leads to improved optimisation performance. Since an analytic approach is intractable, we compare FBBO using three approximate inference schemes to the maximum likelihood approach, using the Expected Improvement (EI) and Upper Confidence Bound (UCB) acquisition functions paired with ARD and isotropic Matern kernels, across 15 well-known benchmark problems for 4 observational noise settings. FBBO using EI with an ARD kernel leads to the best performance in the noise-free setting, with much less difference between combinations of BO components when the noise is increased. FBBO leads to over-exploration with UCB, but is not detrimental with EI. Therefore, we recommend that FBBO using EI with an ARD kernel as the default choice for BO.
Visual Object Tracking: The Initialisation Problem
May 22, 2018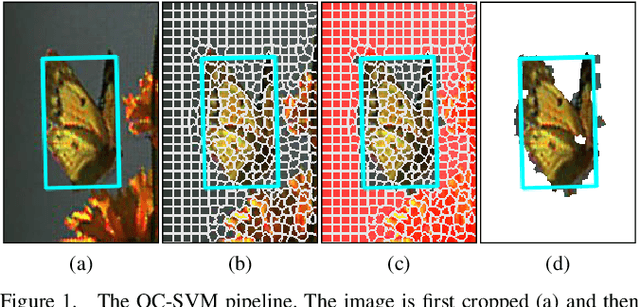



Model initialisation is an important component of object tracking. Tracking algorithms are generally provided with the first frame of a sequence and a bounding box (BB) indicating the location of the object. This BB may contain a large number of background pixels in addition to the object and can lead to parts-based tracking algorithms initialising their object models in background regions of the BB. In this paper, we tackle this as a missing labels problem, marking pixels sufficiently away from the BB as belonging to the background and learning the labels of the unknown pixels. Three techniques, One-Class SVM (OC-SVM), Sampled-Based Background Model (SBBM) (a novel background model based on pixel samples), and Learning Based Digital Matting (LBDM), are adapted to the problem. These are evaluated with leave-one-video-out cross-validation on the VOT2016 tracking benchmark. Our evaluation shows both OC-SVMs and SBBM are capable of providing a good level of segmentation accuracy but are too parameter-dependent to be used in real-world scenarios. We show that LBDM achieves significantly increased performance with parameters selected by cross validation and we show that it is robust to parameter variation.
Part-Based Tracking by Sampling
May 22, 2018



We propose a novel part-based method for tracking an arbitrary object in challenging video sequences, focusing on robustly tracking under the effects of camera motion and object motion change. Each of a group of tracked image patches on the target is represented by pairs of RGB pixel samples and counts of how many pixels in the patch are similar to them. This empirically characterises the underlying colour distribution of the patches and allows for matching using the Bhattacharyya distance. Candidate patch locations are generated by applying non-shearing affine transformations to the patches' previous locations, followed by local optimisation. Experiments using the VOT2016 dataset show that our tracker out-performs all other part-based trackers in terms of robustness to camera motion and object motion change.
A Bayesian Methodology for Estimating Uncertainty of Decisions in Safety-Critical Systems
Dec 01, 2010

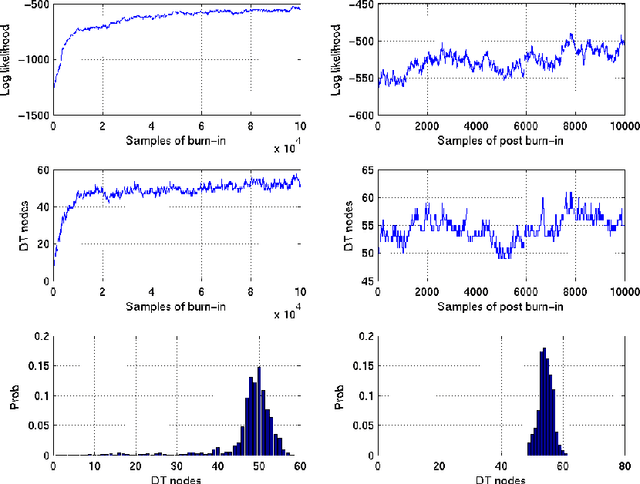
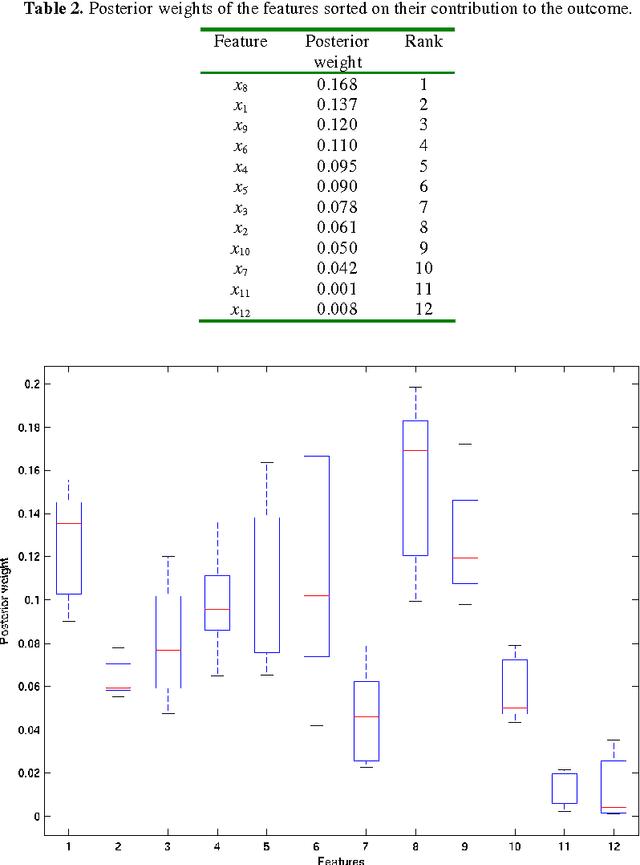
Uncertainty of decisions in safety-critical engineering applications can be estimated on the basis of the Bayesian Markov Chain Monte Carlo (MCMC) technique of averaging over decision models. The use of decision tree (DT) models assists experts to interpret causal relations and find factors of the uncertainty. Bayesian averaging also allows experts to estimate the uncertainty accurately when a priori information on the favored structure of DTs is available. Then an expert can select a single DT model, typically the Maximum a Posteriori model, for interpretation purposes. Unfortunately, a priori information on favored structure of DTs is not always available. For this reason, we suggest a new prior on DTs for the Bayesian MCMC technique. We also suggest a new procedure of selecting a single DT and describe an application scenario. In our experiments on the Short-Term Conflict Alert data our technique outperforms the existing Bayesian techniques in predictive accuracy of the selected single DTs.