 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA portable widefield fundus camera with high dynamic range imaging capability
Dec 20, 2022Fundus photography is indispensable for clinical detection and management of eye diseases. Limited image contrast and field of view (FOV) are common limitations of conventional fundus cameras, making it difficult to detect subtle abnormalities at the early stages of eye diseases. Further improvements of image contrast and FOV coverage are important to improve early disease detection and reliable treatment assessment. We report here a portable fundus camera, with a wide FOV and high dynamic range (HDR) imaging capabilities. Miniaturized indirect ophthalmoscopy illumination was employed to achieve the portable design for nonmydriatic, widefield fundus photography. Orthogonal polarization control was used to eliminate illumination reflectance artifact. With independent power controls, three fundus images were sequentially acquired and fused to achieve HDR function for local image contrast enhancement. A 101{\deg} eye-angle (67{\deg} visual-angle) snapshot FOV was achieved for nonmydriatic fundus photography. The effective FOV can be readily expanded up to 190{\deg} eye-angle (134{\deg} visual-angle) with the aid of a fixation target, without the need of pharmacologic pupillary dilation. The effectiveness of HDR imaging was validated with both normal healthy and pathologic eyes, compared to a conventional fundus camera.
Real-time Lane detection and Motion Planning in Raspberry Pi and Arduino for an Autonomous Vehicle Prototype
Sep 20, 2020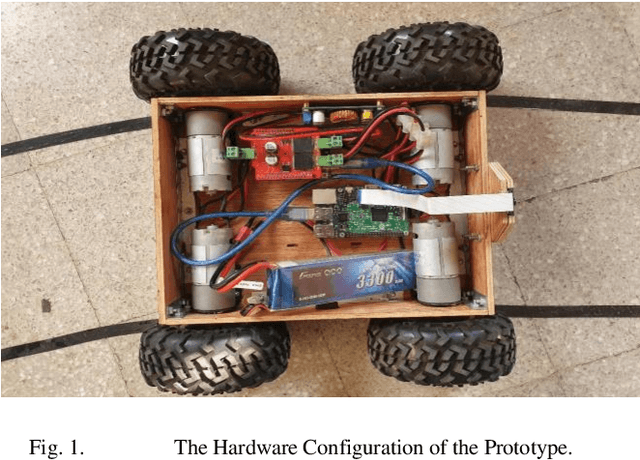
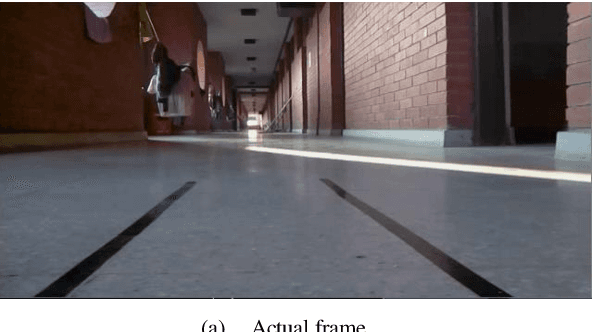
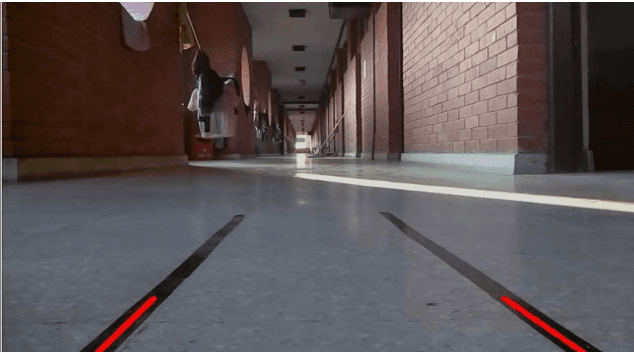

This paper discusses a vehicle prototype that recognizes streets' lanes and plans its motion accordingly without any human input. Pi Camera 1.3 captures real-time video, which is then processed by Raspberry-Pi 3.0 Model B. The image processing algorithms are written in Python 3.7.4 with OpenCV 4.2. Arduino Uno is utilized to control the PID algorithm that controls the motor controller, which in turn controls the wheels. Algorithms that are used to detect the lanes are the Canny edge detection algorithm and Hough transformation. Elementary algebra is used to draw the detected lanes. After detection, the lanes are tracked using the Kalman filter prediction method. Then the midpoint of the two lanes is found, which is the initial steering direction. This initial steering direction is further smoothed by using the Past Accumulation Average Method and Kalman Filter Prediction Method. The prototype was tested in a controlled environment in real-time. Results from comprehensive testing suggest that this prototype can detect road lanes and plan its motion successfully.