 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sophisticated Framework for the Accurate Detection of Phishing Websites
Mar 13, 2024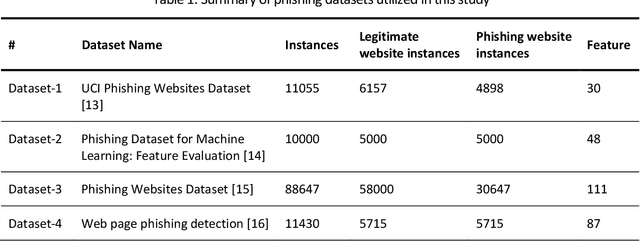
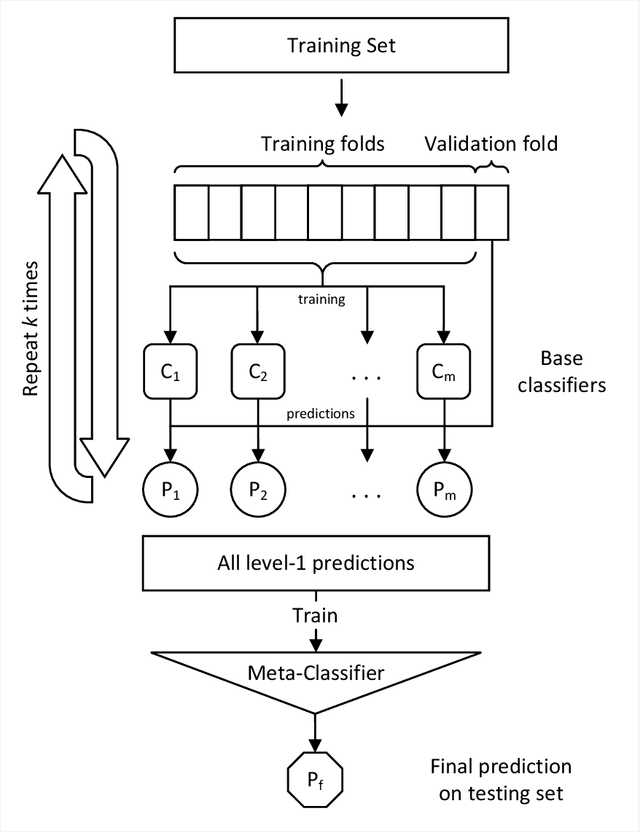
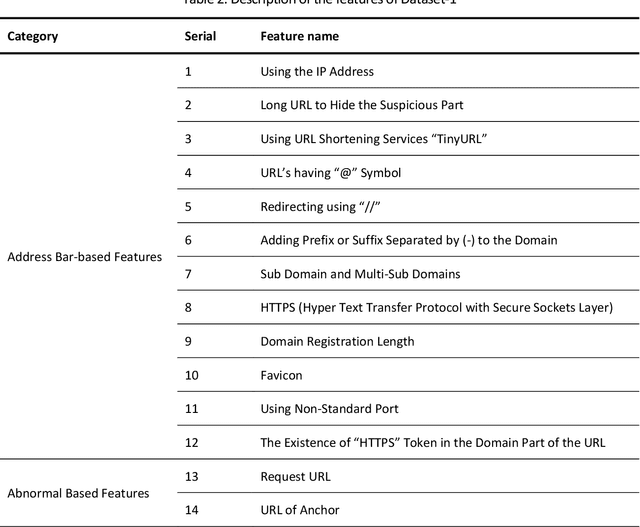
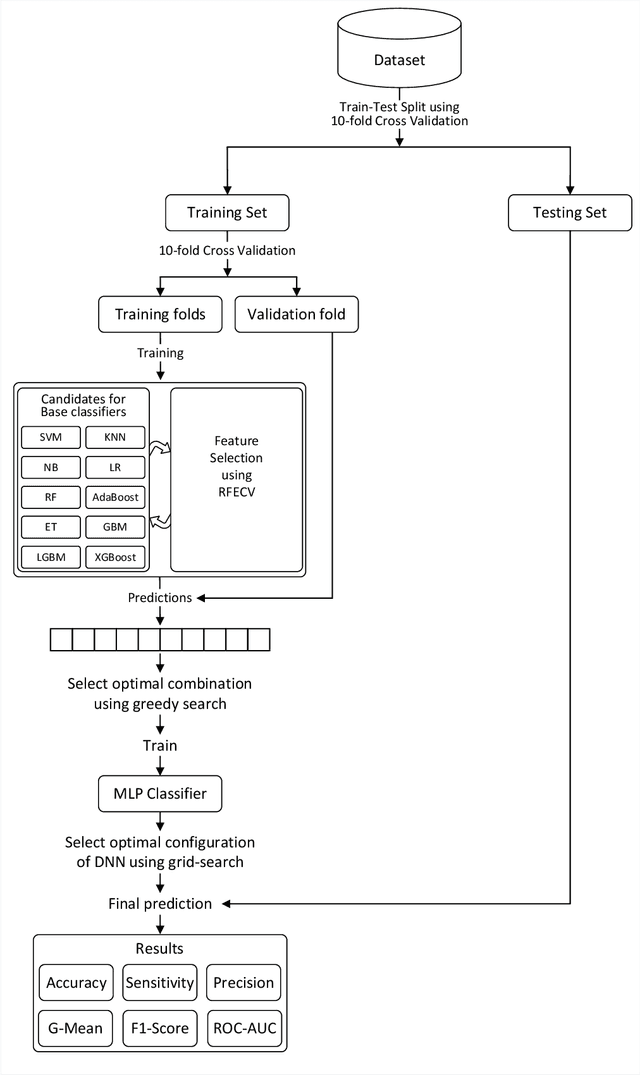
Phishing is an increasingly sophisticated form of cyberattack that is inflicting huge financial damage to corporations throughout the globe while also jeopardizing individuals' privacy. Attackers are constantly devising new methods of launching such assaults and detecting them has become a daunting task. Many different techniques have been suggested, each with its own pros and cons. While machine learning-based techniques have been most successful in identifying such attacks, they continue to fall short in terms of performance and generalizability. This paper proposes a comprehensive methodology for detecting phishing websites. The goal is to design a system that is capable of accurately distinguishing phishing websites from legitimate ones and provides generalized performance over a broad variety of datasets. A combination of feature selection, greedy algorithm, cross-validation, and deep learning methods have been utilized to construct a sophisticated stacking ensemble classifier. Extensive experimentation on four different phishing datasets was conducted to evaluate the performance of the proposed technique. The proposed algorithm outperformed the other existing phishing detection models obtaining accuracy of 97.49%, 98.23%, 97.48%, and 98.20% on dataset-1 (UCI Phishing Websites Dataset), dataset-2 (Phishing Dataset for Machine Learning: Feature Evaluation), dataset-3 (Phishing Websites Dataset), and dataset-4 (Web page phishing detection), respectively. The high accuracy values obtained across all datasets imply the models' generalizability and effectiveness in the accurate identification of phishing websites.
Traffic Congestion Prediction using Deep Convolutional Neural Networks: A Color-coding Approach
Sep 16, 2022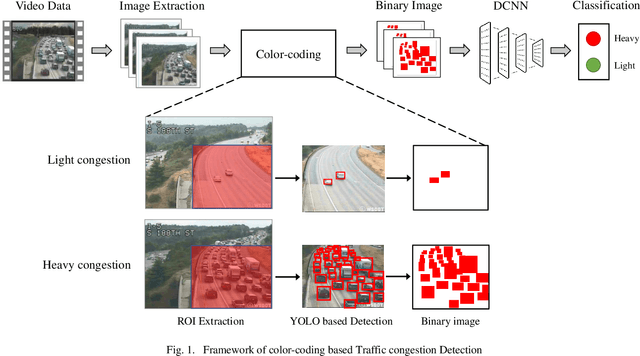
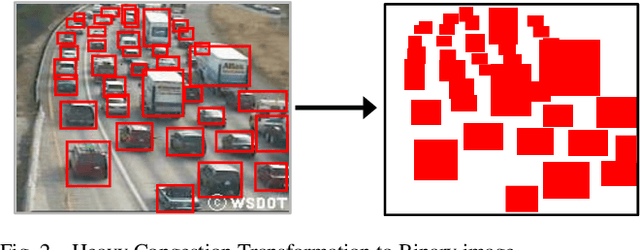
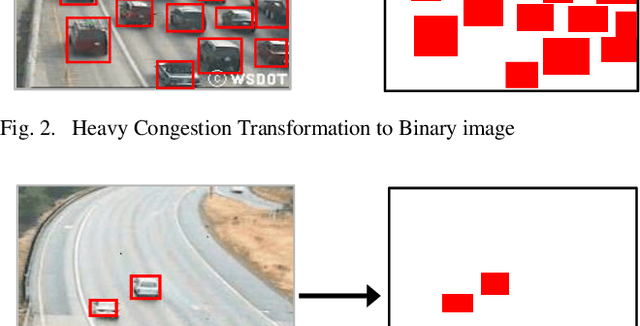
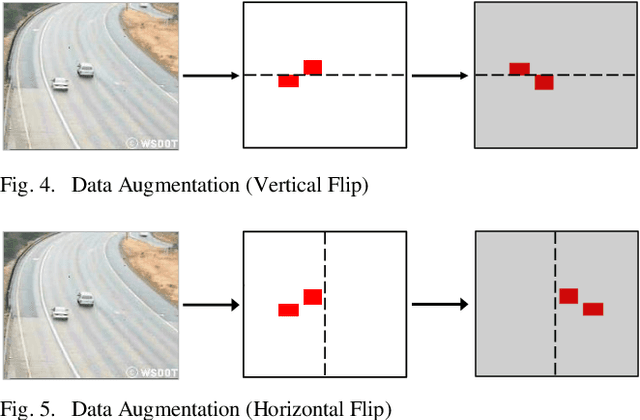
The traffic video data has become a critical factor in confining the state of traffic congestion due to the recent advancements in computer vision. This work proposes a unique technique for traffic video classification using a color-coding scheme before training the traffic data in a Deep convolutional neural network. At first, the video data is transformed into an imagery data set; then, the vehicle detection is performed using the You Only Look Once algorithm. A color-coded scheme has been adopted to transform the imagery dataset into a binary image dataset. These binary images are fed to a Deep Convolutional Neural Network. Using the UCSD dataset, we have obtained a classification accuracy of 98.2%.
Real-time Lane detection and Motion Planning in Raspberry Pi and Arduino for an Autonomous Vehicle Prototype
Sep 20, 2020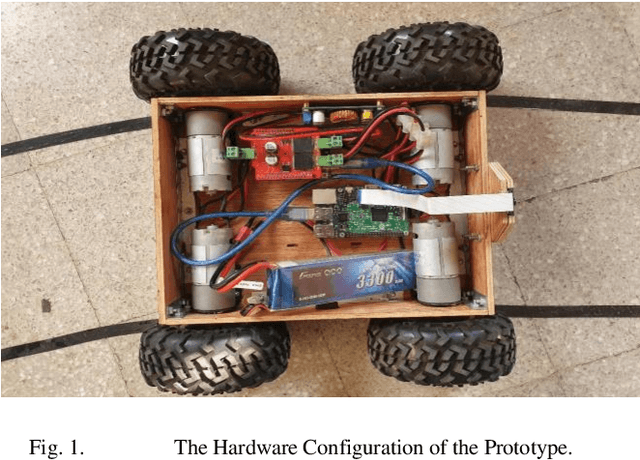
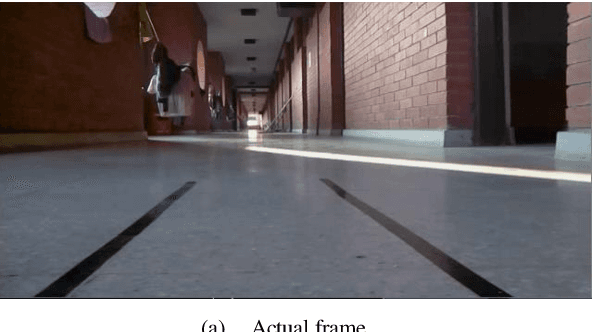
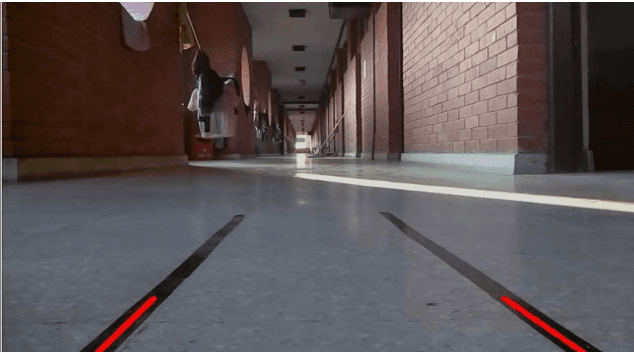

This paper discusses a vehicle prototype that recognizes streets' lanes and plans its motion accordingly without any human input. Pi Camera 1.3 captures real-time video, which is then processed by Raspberry-Pi 3.0 Model B. The image processing algorithms are written in Python 3.7.4 with OpenCV 4.2. Arduino Uno is utilized to control the PID algorithm that controls the motor controller, which in turn controls the wheels. Algorithms that are used to detect the lanes are the Canny edge detection algorithm and Hough transformation. Elementary algebra is used to draw the detected lanes. After detection, the lanes are tracked using the Kalman filter prediction method. Then the midpoint of the two lanes is found, which is the initial steering direction. This initial steering direction is further smoothed by using the Past Accumulation Average Method and Kalman Filter Prediction Method. The prototype was tested in a controlled environment in real-time. Results from comprehensive testing suggest that this prototype can detect road lanes and plan its motion successfully.