 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Attack Resilience in Distributed Platoon Controllers with Model Predictive Control
Jan 08, 2024The extensive use of distributed vehicle platoon controllers has resulted in several benefits for transportation systems, such as increased traffic flow, fuel efficiency, and decreased pollution. The rising reliance on interconnected systems and communication networks, on the other hand, exposes these controllers to potential cyber-attacks, which may compromise their safety and functionality. This thesis aims to improve the security of distributed vehicle platoon controllers by investigating attack scenarios and assessing their influence on system performance. Various attack techniques, including man-in-the-middle (MITM) and false data injection (FDI), are simulated using Model Predictive Control (MPC) controller to identify vulnerabilities and weaknesses of the platoon controller. Countermeasures are offered and tested, that includes attack analysis and reinforced communication protocols using Machine Learning techniques for detection. The findings emphasize the significance of integrating security issues into their design and implementation, which helps to construct safe and resilient distributed platoon controllers.
Real-time Lane detection and Motion Planning in Raspberry Pi and Arduino for an Autonomous Vehicle Prototype
Sep 20, 2020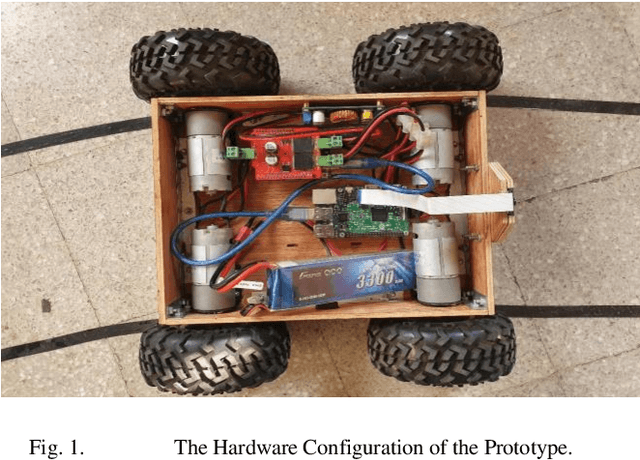
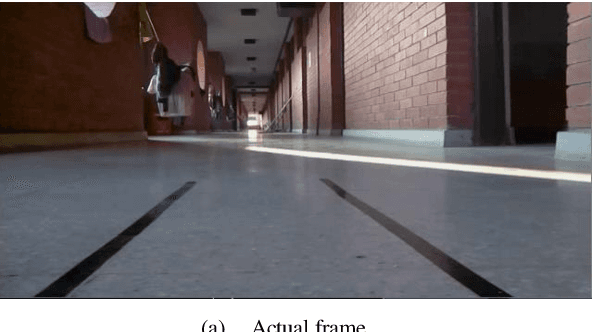
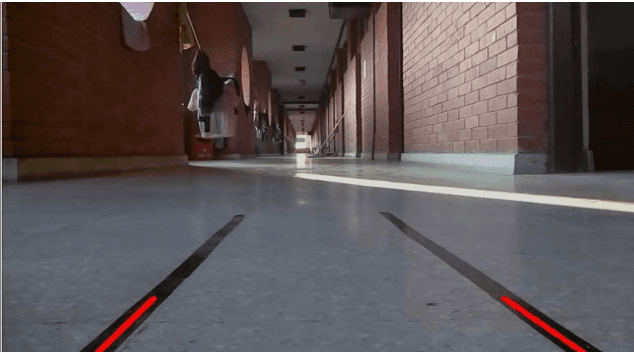

This paper discusses a vehicle prototype that recognizes streets' lanes and plans its motion accordingly without any human input. Pi Camera 1.3 captures real-time video, which is then processed by Raspberry-Pi 3.0 Model B. The image processing algorithms are written in Python 3.7.4 with OpenCV 4.2. Arduino Uno is utilized to control the PID algorithm that controls the motor controller, which in turn controls the wheels. Algorithms that are used to detect the lanes are the Canny edge detection algorithm and Hough transformation. Elementary algebra is used to draw the detected lanes. After detection, the lanes are tracked using the Kalman filter prediction method. Then the midpoint of the two lanes is found, which is the initial steering direction. This initial steering direction is further smoothed by using the Past Accumulation Average Method and Kalman Filter Prediction Method. The prototype was tested in a controlled environment in real-time. Results from comprehensive testing suggest that this prototype can detect road lanes and plan its motion successfully.