 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn the Arms of a Robot: Designing Autonomous Hugging Robots with Intra-Hug Gestures
Feb 20, 2022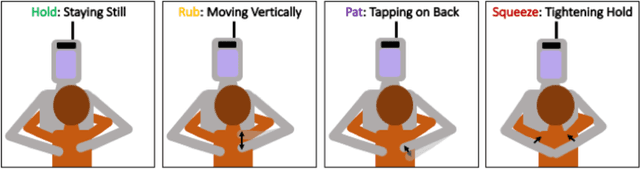
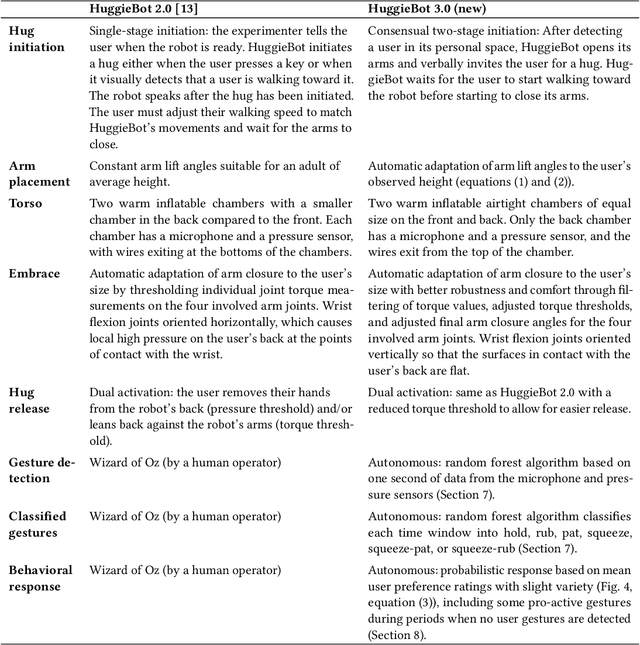
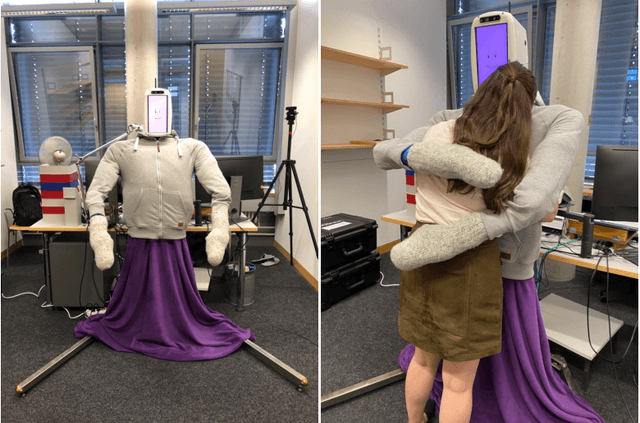
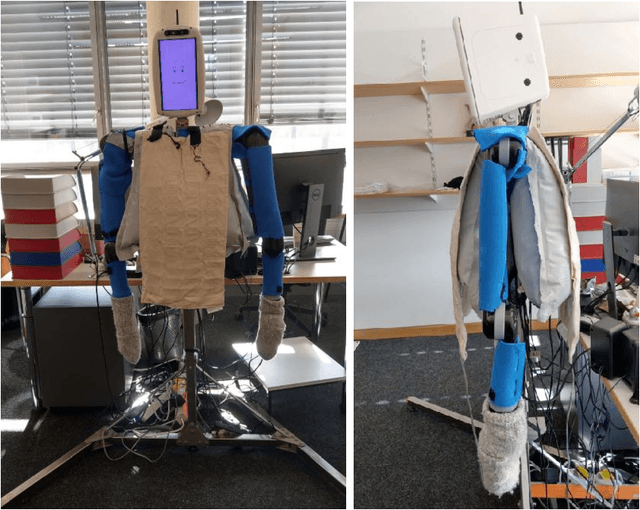
Hugs are complex affective interactions that often include gestures like squeezes. We present six new guidelines for designing interactive hugging robots, which we validate through two studies with our custom robot. To achieve autonomy, we investigated robot responses to four human intra-hug gestures: holding, rubbing, patting, and squeezing. Thirty-two users each exchanged and rated sixteen hugs with an experimenter-controlled HuggieBot 2.0. The robot's inflated torso's microphone and pressure sensor collected data of the subjects' demonstrations that were used to develop a perceptual algorithm that classifies user actions with 88\% accuracy. Users enjoyed robot squeezes, regardless of their performed action, they valued variety in the robot response, and they appreciated robot-initiated intra-hug gestures. From average user ratings, we created a probabilistic behavior algorithm that chooses robot responses in real time. We implemented improvements to the robot platform to create HuggieBot 3.0 and then validated its gesture perception system and behavior algorithm with sixteen users. The robot's responses and proactive gestures were greatly enjoyed. Users found the robot more natural, enjoyable, and intelligent in the last phase of the experiment than in the first. After the study, they felt more understood by the robot and thought robots were nicer to hug.
The Six Hug Commandments: Design and Evaluation of a Human-Sized Hugging Robot with Visual and Haptic Perception
Jan 19, 2021
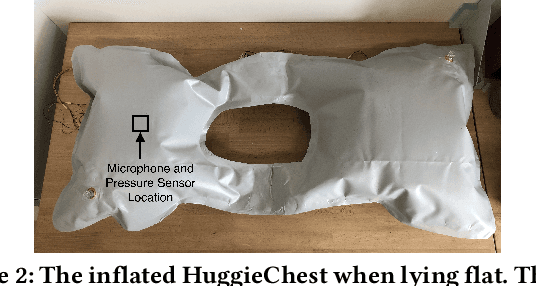

Receiving a hug is one of the best ways to feel socially supported, and the lack of social touch can have severe negative effects on an individual's well-being. Based on previous research both within and outside of HRI, we propose six tenets ("commandments") of natural and enjoyable robotic hugging: a hugging robot should be soft, be warm, be human sized, visually perceive its user, adjust its embrace to the user's size and position, and reliably release when the user wants to end the hug. Prior work validated the first two tenets, and the final four are new. We followed all six tenets to create a new robotic platform, HuggieBot 2.0, that has a soft, warm, inflated body (HuggieChest) and uses visual and haptic sensing to deliver closed-loop hugging. We first verified the outward appeal of this platform in comparison to the previous PR2-based HuggieBot 1.0 via an online video-watching study involving 117 users. We then conducted an in-person experiment in which 32 users each exchanged eight hugs with HuggieBot 2.0, experiencing all combinations of visual hug initiation, haptic sizing, and haptic releasing. The results show that adding haptic reactivity definitively improves user perception a hugging robot, largely verifying our four new tenets and illuminating several interesting opportunities for further improvement.