 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasp Force Assistance via Throttle-based Wrist Angle Control on a Robotic Hand Orthosis for C6-C7 Spinal Cord Injury
Feb 12, 2024

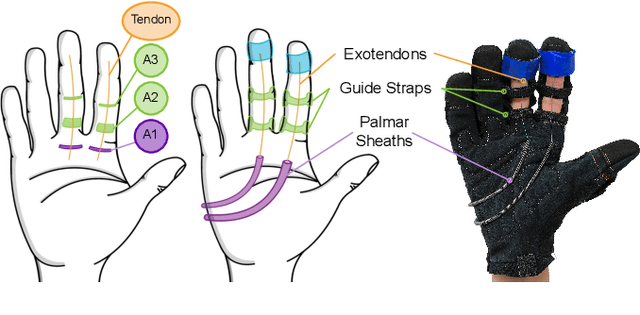

Individuals with hand paralysis resulting from C6-C7 spinal cord injuries frequently rely on tenodesis for grasping. However, tenodesis generates limited grasping force and demands constant exertion to maintain a grasp, leading to fatigue and sometimes pain. We introduce the MyHand-SCI, a wearable robot that provides grasping assistance through motorized exotendons. Our user-driven device enables independent, ipsilateral operation via a novel Throttle-based Wrist Angle control method, which allows users to maintain grasps without continued wrist extension. A pilot case study with a person with C6 spinal cord injury shows an improvement in functional grasping and grasping force, as well as a preserved ability to modulate grasping force while using our device, thus improving their ability to manipulate everyday objects. This research is a step towards developing effective and intuitive wearable assistive devices for individuals with spinal cord injury.
Volitional Control of the Paretic Hand Post-Stroke Increases Finger Stiffness and Resistance to Robot-Assisted Movement
Feb 12, 2024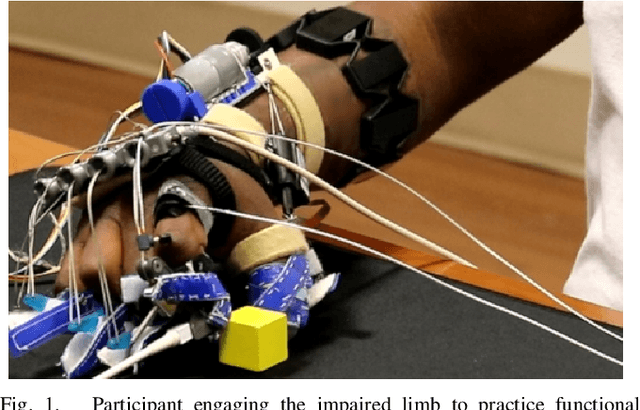
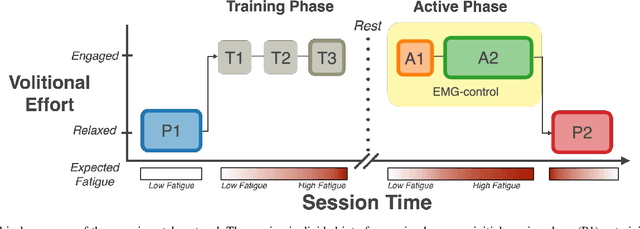
Increased effort during use of the paretic arm and hand can provoke involuntary abnormal synergy patterns and amplify stiffness effects of muscle tone for individuals after stroke, which can add difficulty for user-controlled devices to assist hand movement during functional tasks. We study how volitional effort, exerted in an attempt to open or close the hand, affects resistance to robot-assisted movement at the finger level. We perform experiments with three chronic stroke survivors to measure changes in stiffness when the user is actively exerting effort to activate ipsilateral EMG-controlled robot-assisted hand movements, compared with when the fingers are passively stretched, as well as overall effects from sustained active engagement and use. Our results suggest that active engagement of the upper extremity increases muscle tone in the finger to a much greater degree than through passive-stretch or sustained exertion over time. Potential design implications of this work suggest that developers should anticipate higher levels of finger stiffness when relying on user-driven ipsilateral control methods for assistive or rehabilitative devices for stroke.
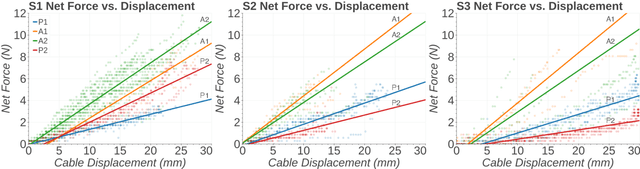
Towards Tenodesis-Modulated Control of an Assistive Hand Exoskeleton for SCI
Nov 28, 2023



Restoration of hand function is one of the highest priorities for SCI populations. In this work, we present a prototype of a robotic assistive orthosis capable of implementing tenodesis user control. The underactuated device provides active grasping assistance while preserving free wrist mobility through the use of Bowden cables. This device enables force modulation during grasping, which was effectively leveraged by a participant with C6 SCI to demonstrate improved grasping abilities using the orthosis, scoring 11 on the Grasp and Release Test using the device compared to 1 without it.