 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpikeATac: A Multimodal Tactile Finger with Taxelized Dynamic Sensing for Dexterous Manipulation
Oct 30, 2025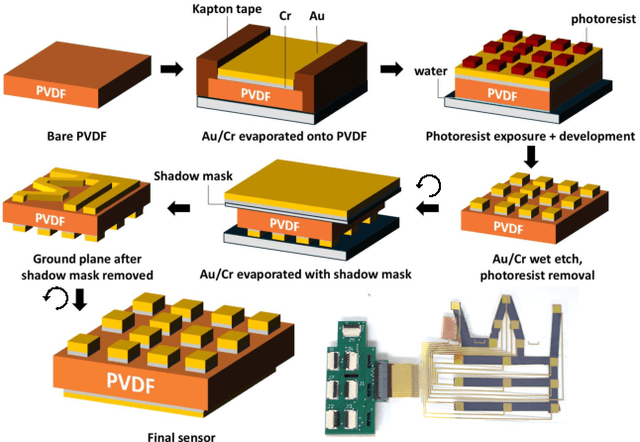
In this work, we introduce SpikeATac, a multimodal tactile finger combining a taxelized and highly sensitive dynamic response (PVDF) with a static transduction method (capacitive) for multimodal touch sensing. Named for its `spiky' response, SpikeATac's 16-taxel PVDF film sampled at 4 kHz provides fast, sensitive dynamic signals to the very onset and breaking of contact. We characterize the sensitivity of the different modalities, and show that SpikeATac provides the ability to stop quickly and delicately when grasping fragile, deformable objects. Beyond parallel grasping, we show that SpikeATac can be used in a learning-based framework to achieve new capabilities on a dexterous multifingered robot hand. We use a learning recipe that combines reinforcement learning from human feedback with tactile-based rewards to fine-tune the behavior of a policy to modulate force. Our hardware platform and learning pipeline together enable a difficult dexterous and contact-rich task that has not previously been achieved: in-hand manipulation of fragile objects. Videos are available at \href{https://roamlab.github.io/spikeatac/}{roamlab.github.io/spikeatac}.
Reciprocal Learning of Intent Inferral with Augmented Visual Feedback for Stroke
Dec 10, 2024



Intent inferral, the process by which a robotic device predicts a user's intent from biosignals, offers an effective and intuitive way to control wearable robots. Classical intent inferral methods treat biosignal inputs as unidirectional ground truths for training machine learning models, where the internal state of the model is not directly observable by the user. In this work, we propose reciprocal learning, a bidirectional paradigm that facilitates human adaptation to an intent inferral classifier. Our paradigm consists of iterative, interwoven stages that alternate between updating machine learning models and guiding human adaptation with the use of augmented visual feedback. We demonstrate this paradigm in the context of controlling a robotic hand orthosis for stroke, where the device predicts open, close, and relax intents from electromyographic (EMG) signals and provides appropriate assistance. We use LED progress-bar displays to communicate to the user the predicted probabilities for open and close intents by the classifier. Our experiments with stroke subjects show reciprocal learning improving performance in a subset of subjects (two out of five) without negatively impacting performance on the others. We hypothesize that, during reciprocal learning, subjects can learn to reproduce more distinguishable muscle activation patterns and generate more separable biosignals.
Grasp Force Assistance via Throttle-based Wrist Angle Control on a Robotic Hand Orthosis for C6-C7 Spinal Cord Injury
Feb 12, 2024


Individuals with hand paralysis resulting from C6-C7 spinal cord injuries frequently rely on tenodesis for grasping. However, tenodesis generates limited grasping force and demands constant exertion to maintain a grasp, leading to fatigue and sometimes pain. We introduce the MyHand-SCI, a wearable robot that provides grasping assistance through motorized exotendons. Our user-driven device enables independent, ipsilateral operation via a novel Throttle-based Wrist Angle control method, which allows users to maintain grasps without continued wrist extension. A pilot case study with a person with C6 spinal cord injury shows an improvement in functional grasping and grasping force, as well as a preserved ability to modulate grasping force while using our device, thus improving their ability to manipulate everyday objects. This research is a step towards developing effective and intuitive wearable assistive devices for individuals with spinal cord injury.
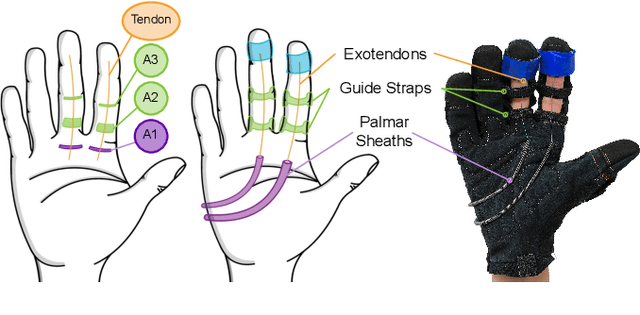
Towards Tenodesis-Modulated Control of an Assistive Hand Exoskeleton for SCI
Nov 28, 2023



Restoration of hand function is one of the highest priorities for SCI populations. In this work, we present a prototype of a robotic assistive orthosis capable of implementing tenodesis user control. The underactuated device provides active grasping assistance while preserving free wrist mobility through the use of Bowden cables. This device enables force modulation during grasping, which was effectively leveraged by a participant with C6 SCI to demonstrate improved grasping abilities using the orthosis, scoring 11 on the Grasp and Release Test using the device compared to 1 without it.